

面向人形机器人的谐波减速器及其 ADI 驱动与控制方案

一、谐波减速器介绍及应用场景
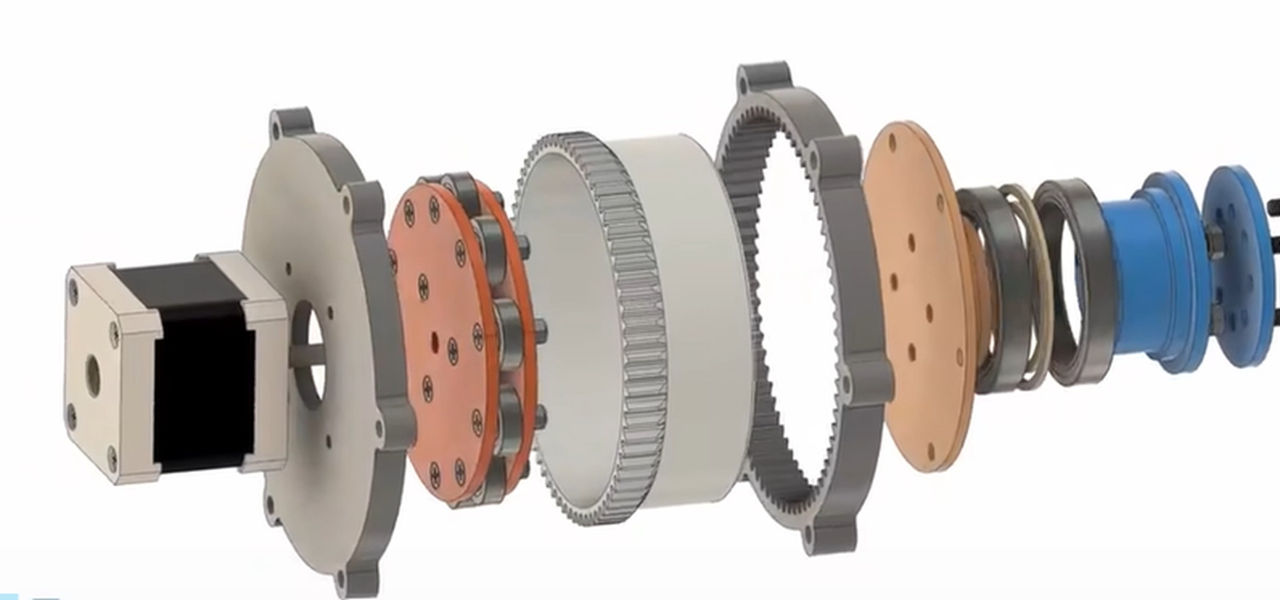
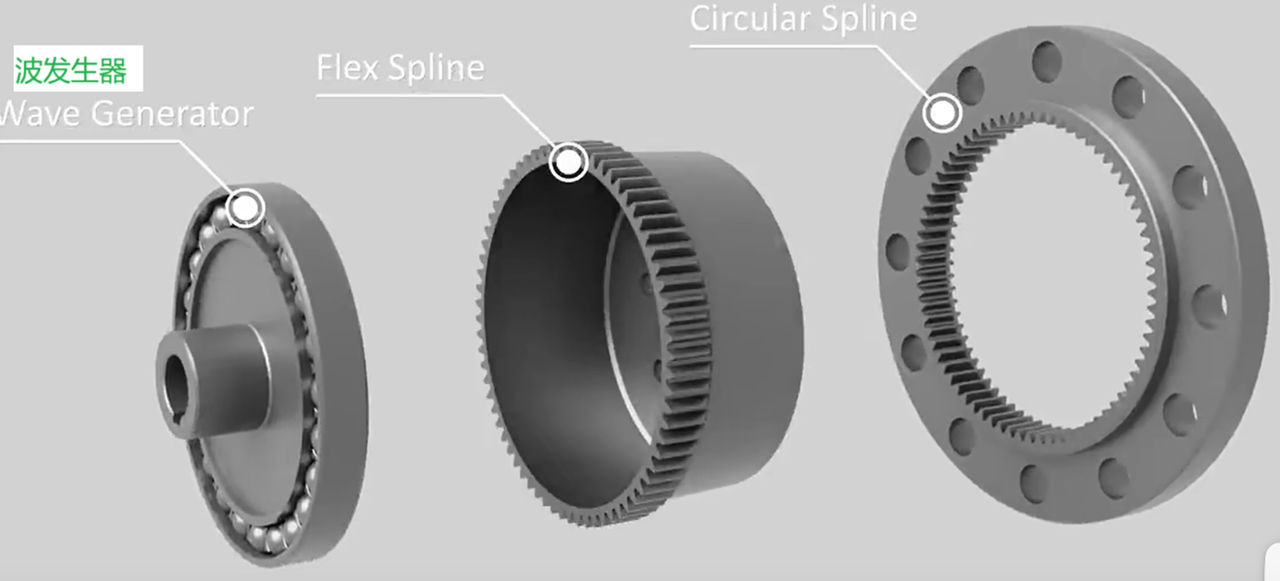
谐波减速器(Harmonic Drive)是一种高精度、高减速比的机械传动装置,利用柔性齿轮和刚性齿轮之间的弹性变形实现运动传递。其核心由三部分组成:波发生器、柔性齿轮和刚性齿轮。
- 波发生器:椭圆凸轮,使柔性齿轮产生弹性变形。
- 柔性齿轮:薄壁弹性齿轮,随波发生器变形并与刚性齿轮啮合。
- 刚性齿轮:固定或输出端齿轮,齿数略多于柔性齿轮。
谐波减速器工作原理:
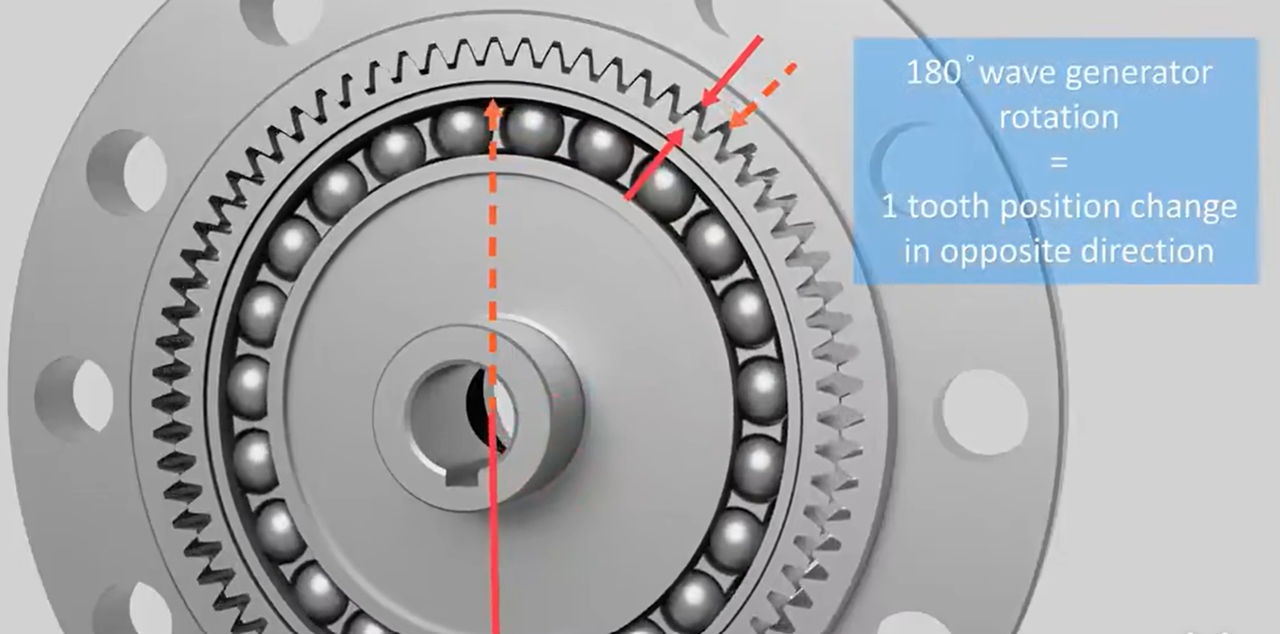
谐波减速器的运动传递机制基于波发生器与柔性齿轮的协同作用。当波发生器开始旋转时,其椭圆形轮廓会带动柔性齿轮产生周期性弹性变形。由于柔性齿轮和刚性齿轮之间存在齿数差(通常为 2 齿),这种变形会导致齿轮啮合点发生规律性变化。
具体而言,波发生器每完成 180 度旋转,柔性齿轮的啮合位置就会沿圆周方向移动一个齿距。这种相对位移的累积效应使得柔性齿轮与刚性齿轮之间产生转速差。例如,当波发生器旋转一周时,柔性齿轮仅移动(齿数差/刚性齿轮齿数)× 360 度,从而实现高减速比传动。如下图(图3)为谐波减速器工作原理演示示意图:
谐波减速器核心优势以及应用场景:
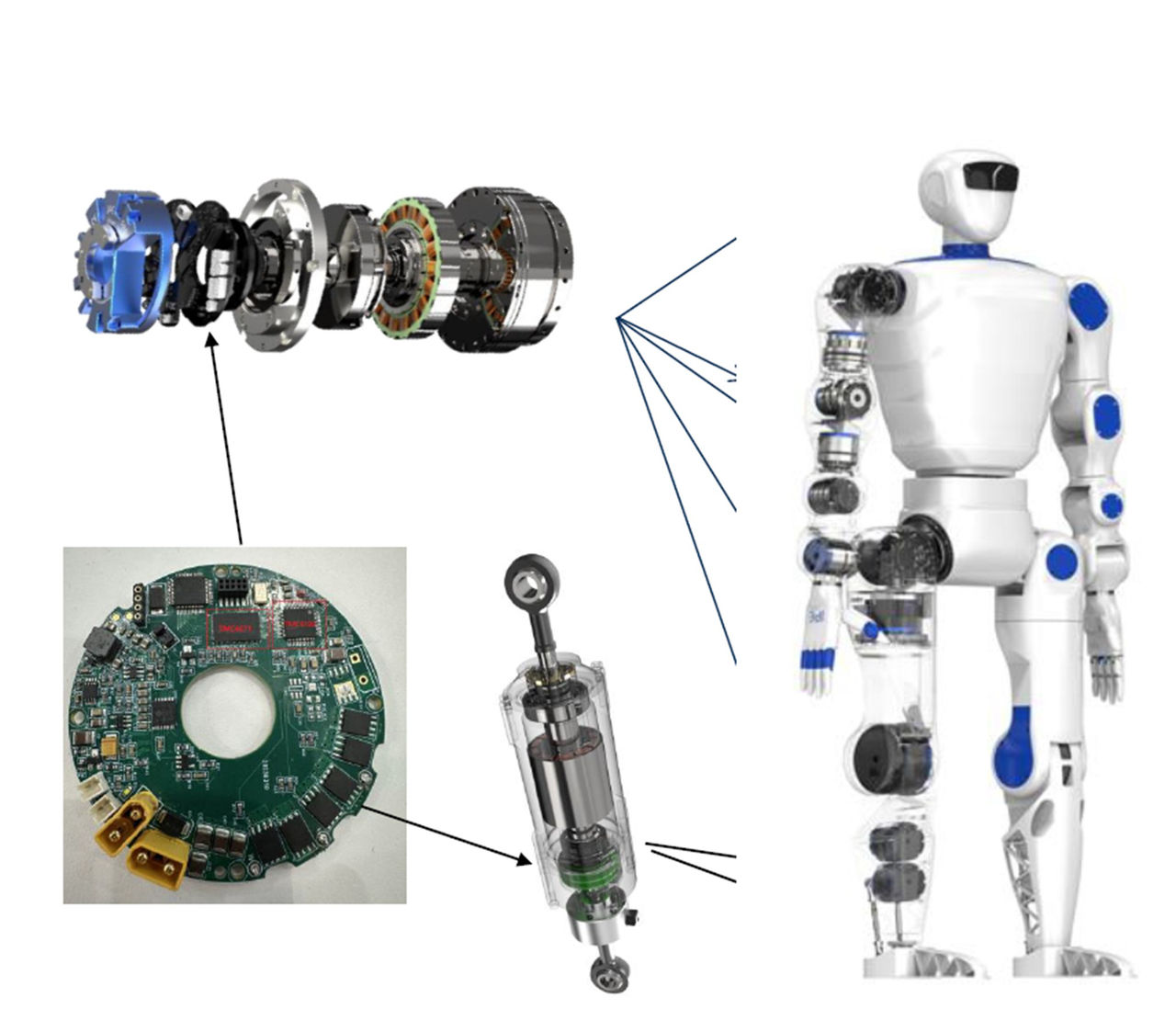
谐波减速器凭借高精度、零背隙、紧凑结构等优势,成为高端机器人关节的核心部件,尤其适用于人形机器人、协作机器人、医疗设备等对精度和空间要求严格的场景。随着人形机器人产业的爆发,谐波减速器需求将持续增长。
特性 | 说明 |
高减速比 | 单级可达 50~250:1,无需多级减速 |
零背隙(Zero Backlash) | 弹性啮合消除齿轮间隙,提高定位精度 |
高扭矩密度 | 体积小、重量轻,但承载能力强 |
高精度 | 重复定位精度可达 ±10 弧秒以内 |
结构紧凑 | 适合空间受限的机器人关节 |
高传动效率 | 单级效率可达 80%~90% |
表1 有源滤波器的应用与用途
减速器类型 | 谐波减速器 | RV 减速器 | 行星减速器 |
减速比 | 50~250:1 | 30~200:1 | 3~100:1 |
精度 | 极高(零背隙) | 高 | 一般 |
体积/重量 | 最紧凑 | 较大 | 中等 |
承载能力 | 中高 | 最高 | 低中 |
成本 | 较高 | 高 | 低 |
典型应用 | 协作机器人 | 工业机器人基座 | 普通自动化设备 |
表2 谐波减速器的应用场景
二、谐波减速器模组中 ADI 的方案
(一)谐波减速器的电机控制
首先电机与谐波减速器必须是要功率匹配,不能小带大或者大带小,设计时需要先确定谐波减速器的参数(扭矩、转速),然后根据谐波减速器参数匹配合适的电机。ADI 的方案针对谐波减速器模组中电机控制,能实现高精度位置与速度控制以及实时动态响应优化。
(二)谐波减速器模组中驱动板设计关键参数
1、电气性能参数
(1) 电流控制性能
参数 | 指标要求 | 说明 |
电流环带宽 | ≥1kHz | 确保快速扭矩响应 |
电流采样精度 | ≤0.5% FS(全量程) | 影响扭矩控制精度 |
PWM 频率 | 20kHz~50kHz | 降低电机噪声和损耗 |
过流保护响应 | ≤5μs | 防止 MOSFET 损坏 |
(2) 电压与功率
参数 | 指标要求 | 说明 |
输入电压范围 | 24V/48V(工业级)或 12V(消费级) | 适应不同应用场景 |
最大输出电流 | 10A~50A | 需匹配谐波减速器负载 |
效率 | ≥90% | 降低发热,提高续航 |
2、位置与速度控制参数
(1) 编码器/旋变接口
参数 | 指标要求 | 说明 |
编码器类型 | 增量式/绝对值/旋变 | 增量式成本低,绝对值精度高 |
分辨率 | ≥17bit(131,072 PPR) | 影响定位精度 |
接口协议 | SPI/ABZ/EnDat/SSI/BISS-C | 高精度应用 |
更新速率 | ≥10kHz | 确保实时位置反馈 |
(2)位置控制性能
参数 | 指标要求 | 说明 |
位置环带宽 | 50Hz~200Hz | 影响动态响应 |
重复定位精度 | ≤±10 arc-sec(0.0028°) | 谐波减速器核心优势 |
跟随误差 | ≤0.1°(高速运动时) | 影响轨迹精度 |
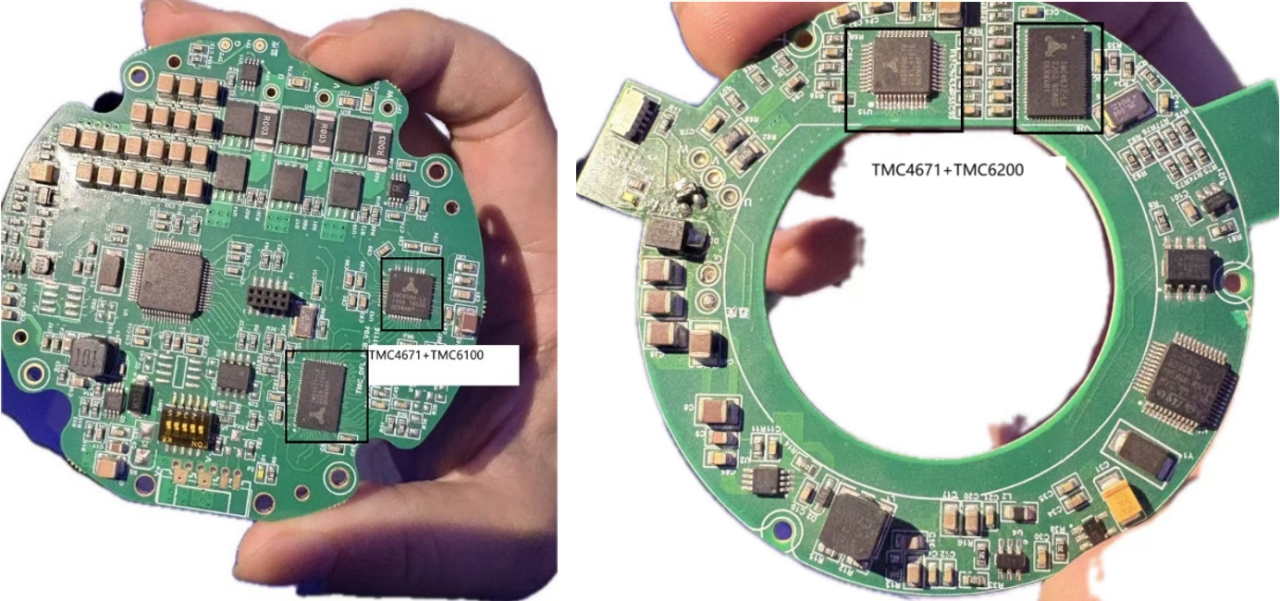
(三)ADI的产品方案以及板卡实物
1、ADI TMC4671 方案
TMC4671 是一款专为多类型电机设计的全硬件集成伺服控制器,它将硬件级 FOC(磁场定向控制)与灵活的接口集成于单一芯片,可实现对三相永磁同步电机(PMSM)/无刷直流电机(BLDC)、两相步进电机、单相直流电机及音圈电机的磁场定向控制(FOC)。所有控制功能均通过硬件固化实现,无需依赖软件计算,同时集成 ∆Σ-ADC、多类型位置传感器接口与位置插值器,是一款覆盖从消费电子到工业自动化的全场景伺服核心器件。TMC4671 采用 76 引脚 QFN 封装(10.5mm×6.5mm),工作温度范围宽广(-40℃ 至 125℃),核心供电电压为 3.3V(范围 3.15V-3.45V),能够适应各种严苛的工作环境。
TMC4671 的核心技术优势在于其创新的硬件架构设计——采用全硬件化 FOC(磁场定向控制)实现方案,将伺服控制全链路在芯片层面实现硬件固化,彻底革新了传统的"MCU + 外围分立器件"控制架构。与依赖软件算法实现的传统伺服控制器相比,该芯片通过专用硬件加速器实现了三大核心控制回路的全集成:包括扭矩环、速度环和位置环在内的所有关键控制功能,均通过芯片内置的硬件逻辑电路实时执行,完全摆脱了对处理器软件计算的依赖。
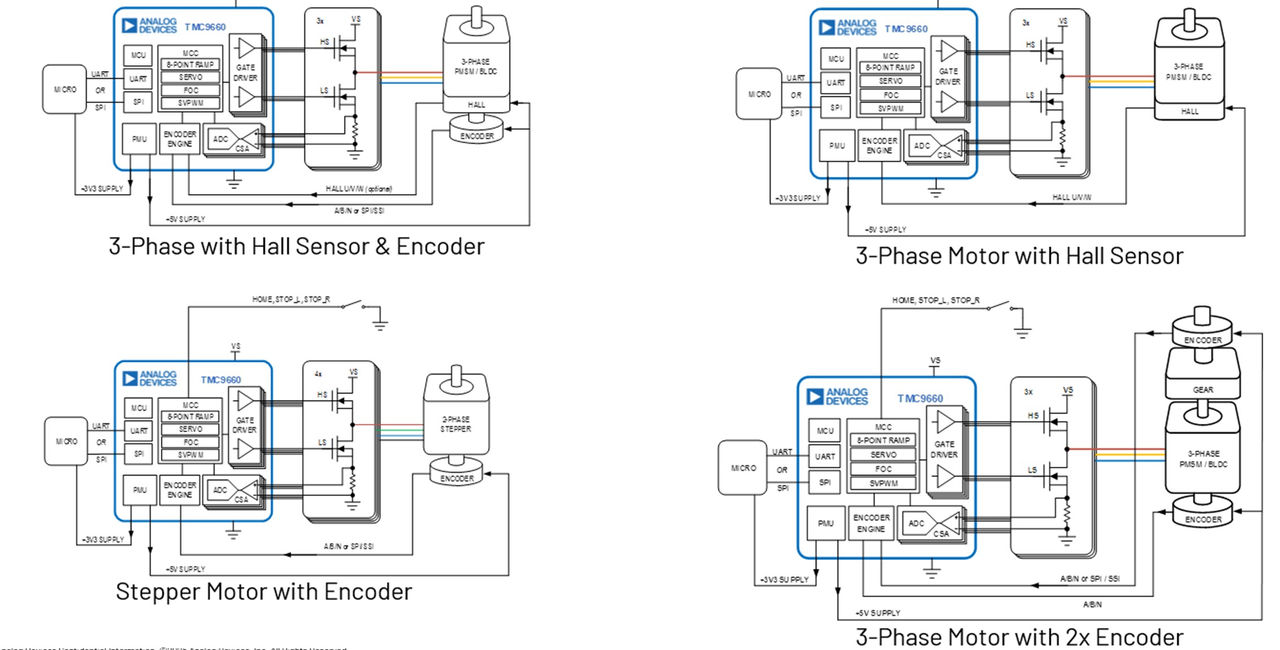
2、ADI TMC9660 设计方案
TMC9660 是应用于人形机器人的一款电机驱动器和运动控制器,这颗 IC 最大的特点是具有智能栅极驱动器 IC,内置伺服(FOC)控制器和降压转换器以及快速模拟电流感应(ADC 和 CSA)。控制环路的最高频率达到 100kHz,控制环路频率的提高能够降低电机的电流/扭矩纹波,增加电机控制带宽,实现更高的动态范围。无需软件编程即可轻松实现高级的 FOC 控制算法,最大程度的方便了客户使用。下图(图7)为 TMC9660 的系统框图:
3、高边电流检测的 ADI 方案:AD8410A / AD8411A
AD8410A 和 AD8411A 是高电压、高带宽电流检测放大器。AD8410A 器件具有 20V/V 的初始增益和 2.2MHz 带宽,在整个温度范围内最大增益误差为 ±0.13%。AD8411A 具有 50V/V 的初始增益和 2.7MHz 带宽,在整个温度范围内最大增益误差为 ±0.15%。下图(图8)为AD8410A / AD8411A 的系统框图:
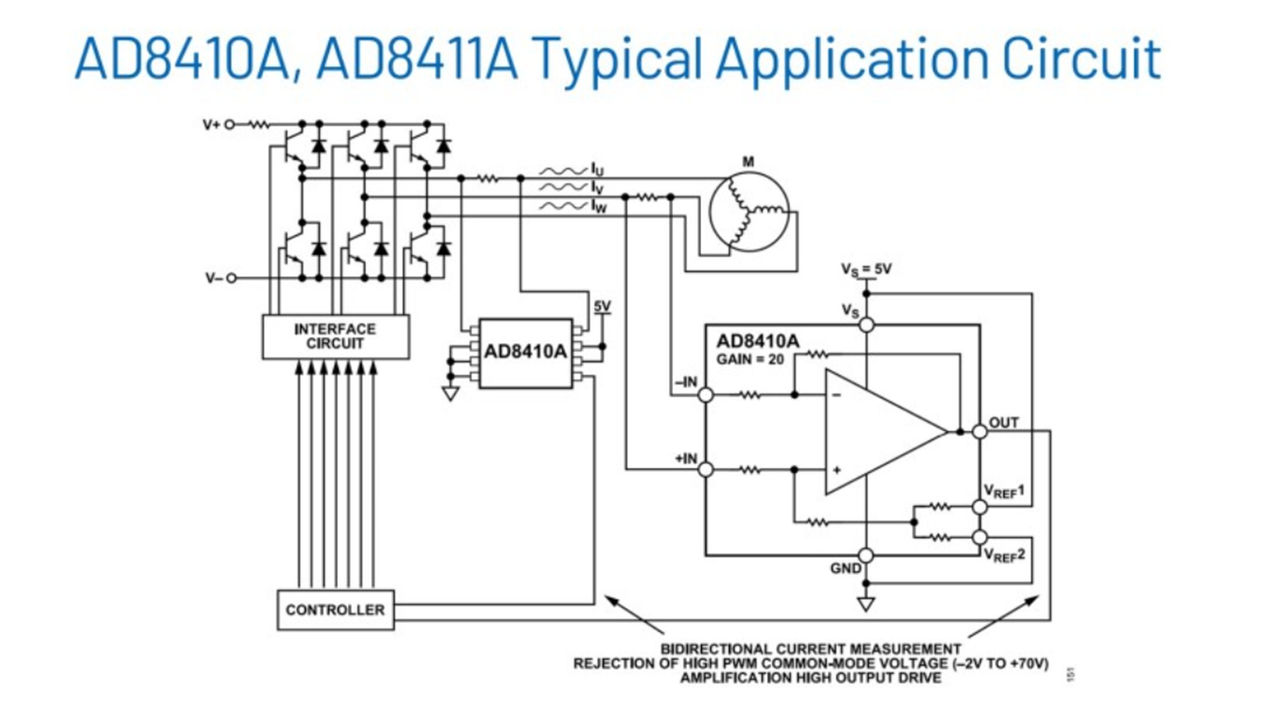
这些器件的缓冲输出电压直接与任何典型转换器连接。AD8410A 和 AD8411A 在 -2V 至 +70V 范围内的最小直流共模抑制比(CMRR)为 123dB。这些放大器在各种工业和汽车应用中通过分流电阻器执行双向电流测量。
实际使用场景:
电机采集过程中会出现反向电动势的原因是电机因电磁感应产生的与电源电动势相反电势。直流电机在制动过程中会产生明显的反向电流。交流电机在启动和调速阶段也会出现反向电流情况。所以针对双向电流测量 ADI 的电流检测放大器方案适配性非常高。
三、总结
谐波减速器是人形机器人关节驱动的核心部件之一,本文系统阐述了谐波减速器的工作原理与技术优势,并重点介绍了 ADI 提供的包括 TMC4671、TMC9660、AD8410A / AD8411A 在内的完整电机控制与驱动解决方案。欲了解关于更多 ADI 相关方案或技术信息,请与骏龙科技当地的办事处联系或点击下方「联系我们」,提交您的需求,骏龙科技公司愿意为您提供更详细的技术解答。
更多信息:
相关链接
Copyright 2026 Macnica Cytech Limited

