

面向人形机器人的六维力传感器及其 ADI 高精度信号链方案
在《面向人形机器人的谐波减速器及其 ADI 驱动与控制方案》和《面向人形机器人的一维力传感器及其 ADI 方案》两篇文章中,我们分别探讨了人形机器人的谐波减速器驱动与控制方案以及一维力传感器解决方案。作为人形机器人专题系列的第三篇,本文将聚焦于机器人力感知系统中的核心部件——六维力传感器,介绍其工作原理、设计要点,并重点阐述 ADI 在该领域的应用方案。
一、六维力传感器介绍以及机器人应用场景
六维力传感器是一种能够同时测量作用在物体上的三个力分量 (Fx, Fy, Fz) 和三个力矩分量 (Mx, My, Mz) 的精密仪器。这里的“维”指的就是这六个独立的力学分量。
- 三个力分量:
- Fx:沿 X 轴的力 (前后)
- Fy:沿 Y 轴的力 (左右)
- Fz:沿 Z 轴的力轴的力 (上下)
- 三个力矩分量:
- Mx:绕 X 轴的扭矩 (翻滚)
- My:绕 Y 轴的扭矩 (俯仰)
- Mz:绕 Z 轴的扭矩 (偏航)
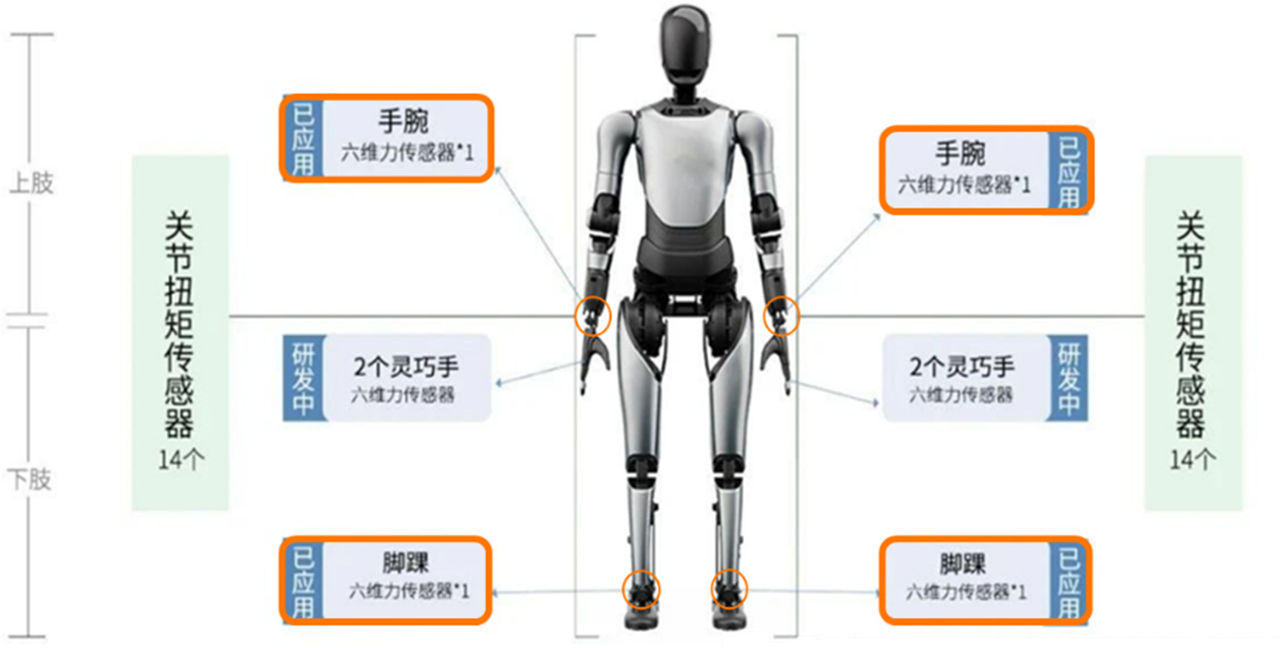
六维力传感器能完整地测量出作用在其上的任何力和转矩的“全貌”。下图 (图1)、(图2) 为六维力传感器工作介绍及在人形机器人中的应用分布图:

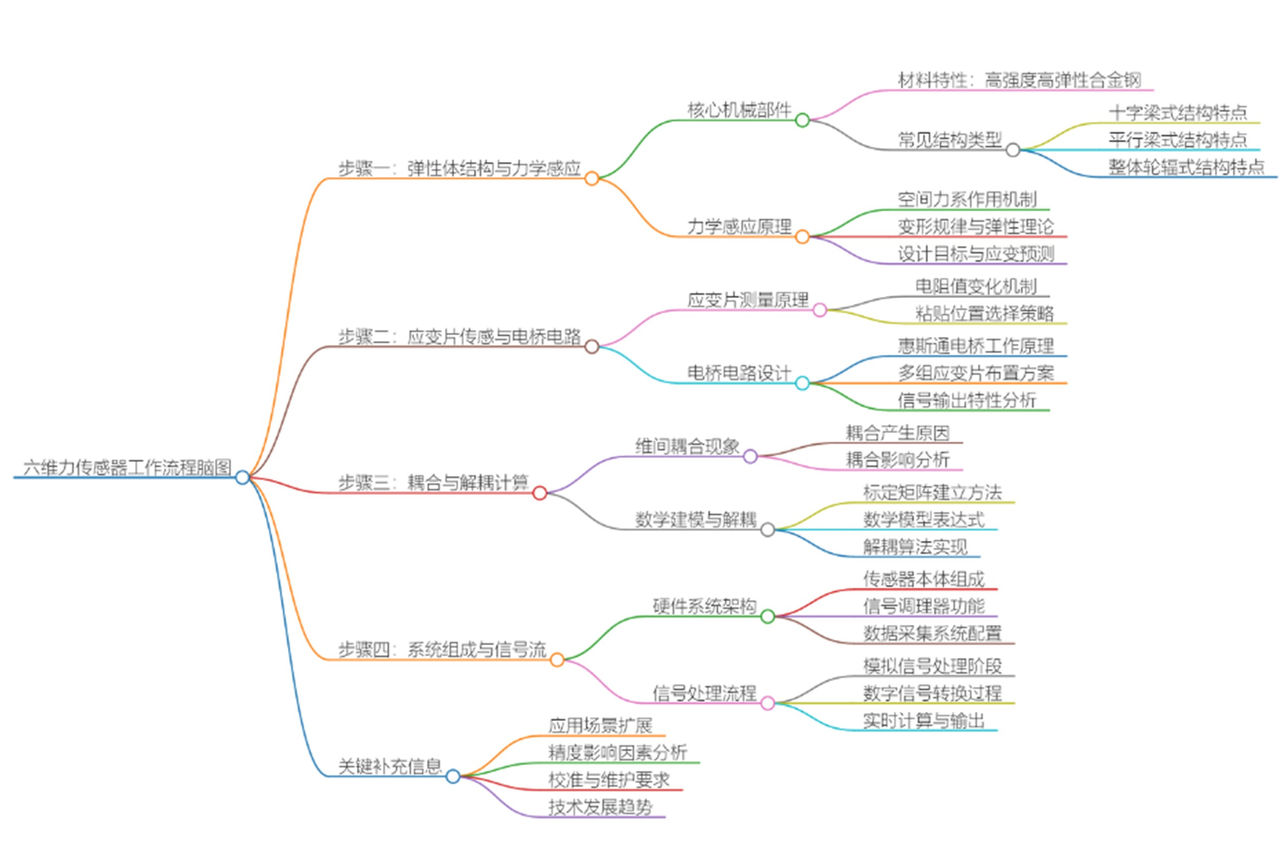
二、六维力传感器的工作原理
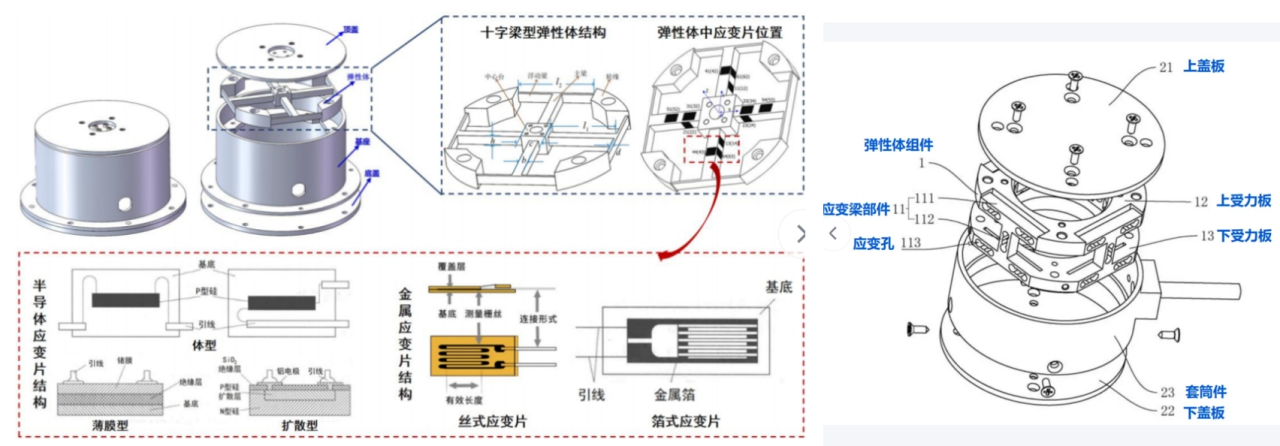
(一)弹性体结构与力学感应
弹性体是传感器的力学核心,通常采用高强度、高弹性的特殊合金 (如铝合金或钛合金) 制成。其结构设计 (如十字梁式、平行梁式或整体轮辐式) 经过精密计算,目的是让不同的力/力矩分量在弹性体的特定区域产生可预测的、敏感的应变模式。
核心原理
当外部载荷作用于弹性体时,弹性体会发生与所受力成一定关系的微小形变。例如,一个纯粹的轴向力 (Fz) 可能引起支撑梁的均匀拉伸或压缩,而一个绕 X 轴的弯矩 (Mx) 则可能导致一对梁受拉、另一对梁受压的不均匀形变。
(二)应变片传感与电桥电路
应变片是感知微观形变的关键元件,被牢固地粘贴在弹性体预先计算好的高灵敏度区域。
电阻变化
当弹性体形变时,应变片随之形变,其电阻值会因应变效应 (金属应变片) 或压阻效应 (半导体应变片) 而发生改变。
信号转换
为了检测这种微小的电阻变化,应变片被接入惠斯通电桥电路。电桥将电阻变化转换为与之成比例的、可测量的差分电压信号。一个六维力传感器中通常包含多组应变片 (如 8 组或 16 组),以不同的方向分布,用于灵敏地捕捉不同力/力矩分量引起的复杂应变模式。
(三)耦合与解耦计算
这是将原始物理信号转化为准确力学信息的数据处理核心。
耦合现象
由于物理结构的复杂性,任何一个方向的力或力矩都可能引起多个应变片通道的信号变化,这种现象称为维间耦合。例如,施加力矩 Mx 时,可能会在测量 Fz 的通道上产生干扰信号。
解耦算法
为了解决耦合问题,需要通过严格的标定过程来建立一个数学模型——即标定矩阵 C。标定过程通过专业的六维联合加载设备,对传感器施加已知的、覆盖全量程的力/力矩组合 (F 已知),并记录下对应的所有电压输出值 (V),从而求解出矩阵 C。在实际测量中,只需将测得的电压向量 V 乘以标定矩阵 C,即可通过解耦计算得到准确的六维力/力矩向量 F (F=C×V)。
(四)系统组成与信号流
一个完整的六维力传感器系统是硬件和软件的协同工作。
信号调理与采集
从电桥输出的电压信号通常非常微弱,需要经过信号调理器进行放大和滤波处理,然后由数据采集系统转换为数字信号。
计算与输出
数字信号被送入计算机或嵌入式处理器,运行解耦算法等软件,实时计算出最终的六维力/力矩值。

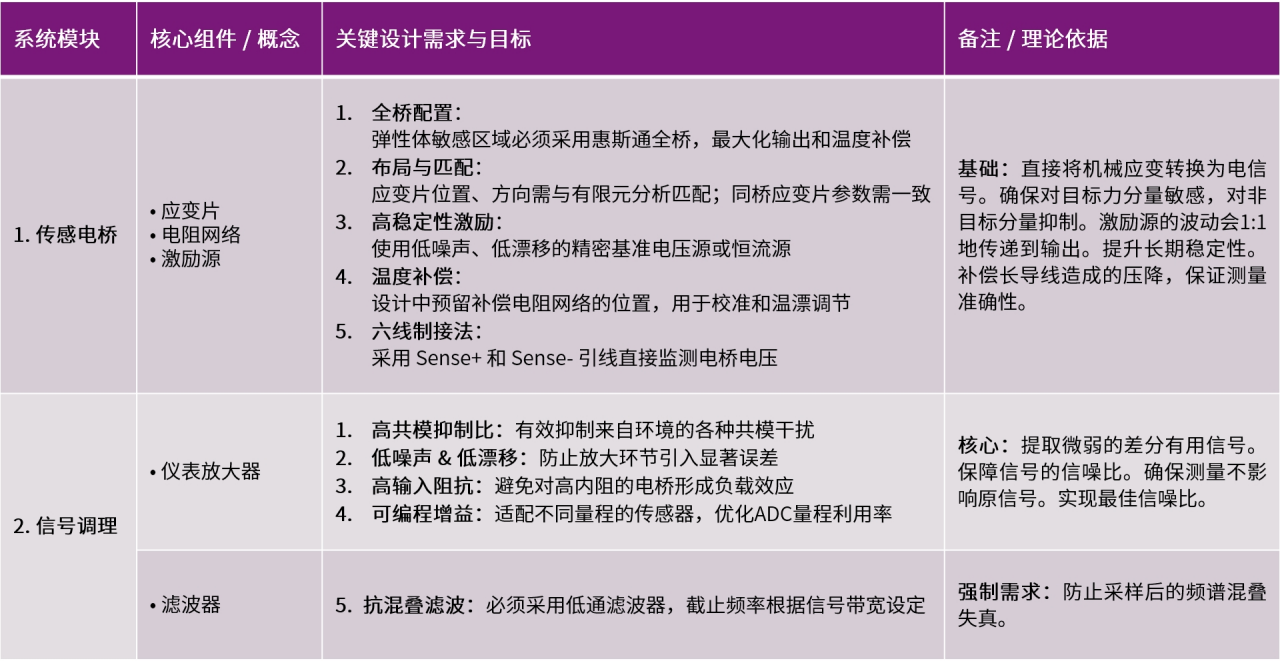
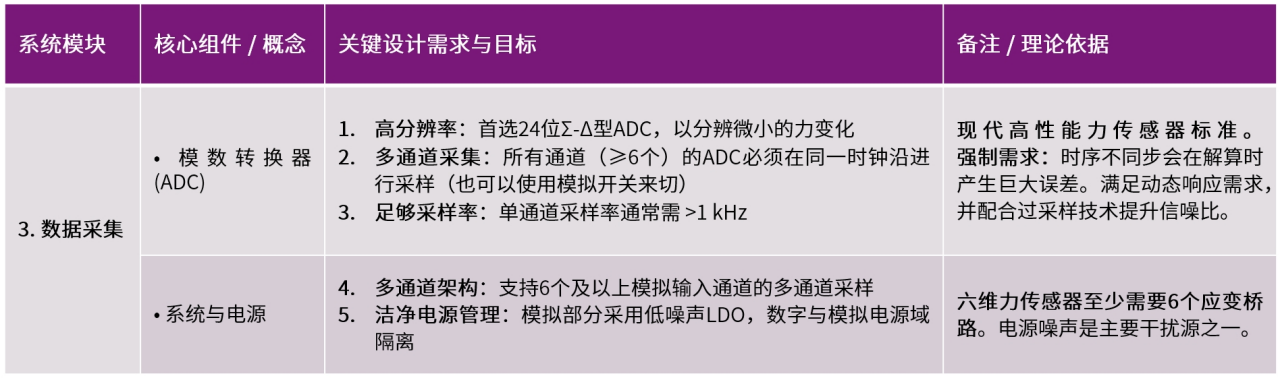
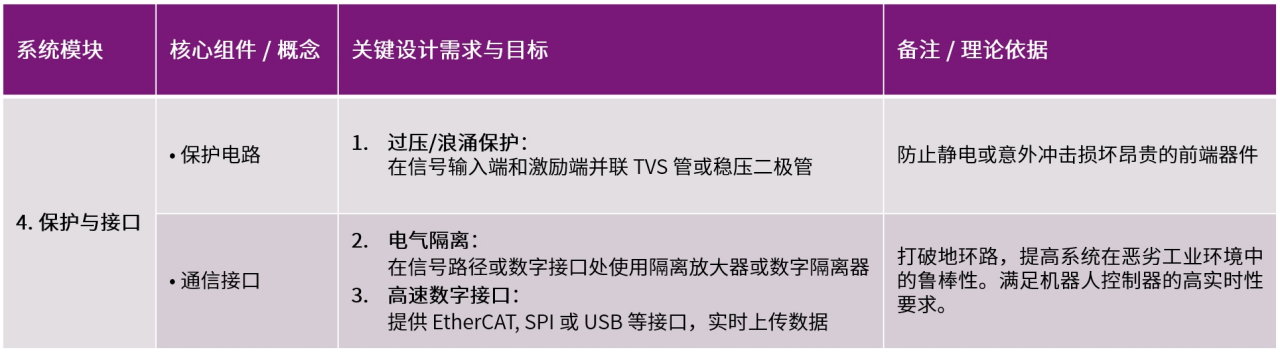
三、六维力传感器的电路设计需求
根据系统模块划分,设计需求可划分如下:
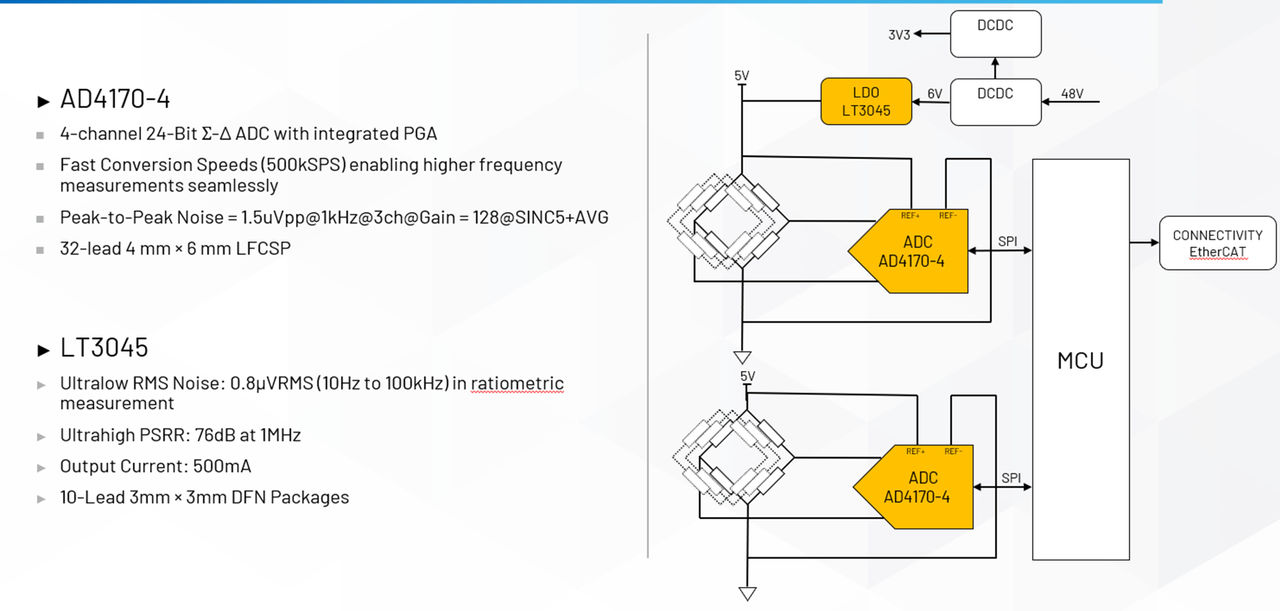
四、ADI 面向六维力传感器的高性能信号链方案:AD4170-4
AD4170-4 是 ADI 推出的一款高性能、高集成度的精密模拟前端 (AFE) 芯片。它集成了 24 位 Σ-Δ 模数转换器 (ADC) 和一系列关键功能模块,专为满足苛刻的工业与仪器仪表测量需求而设计。
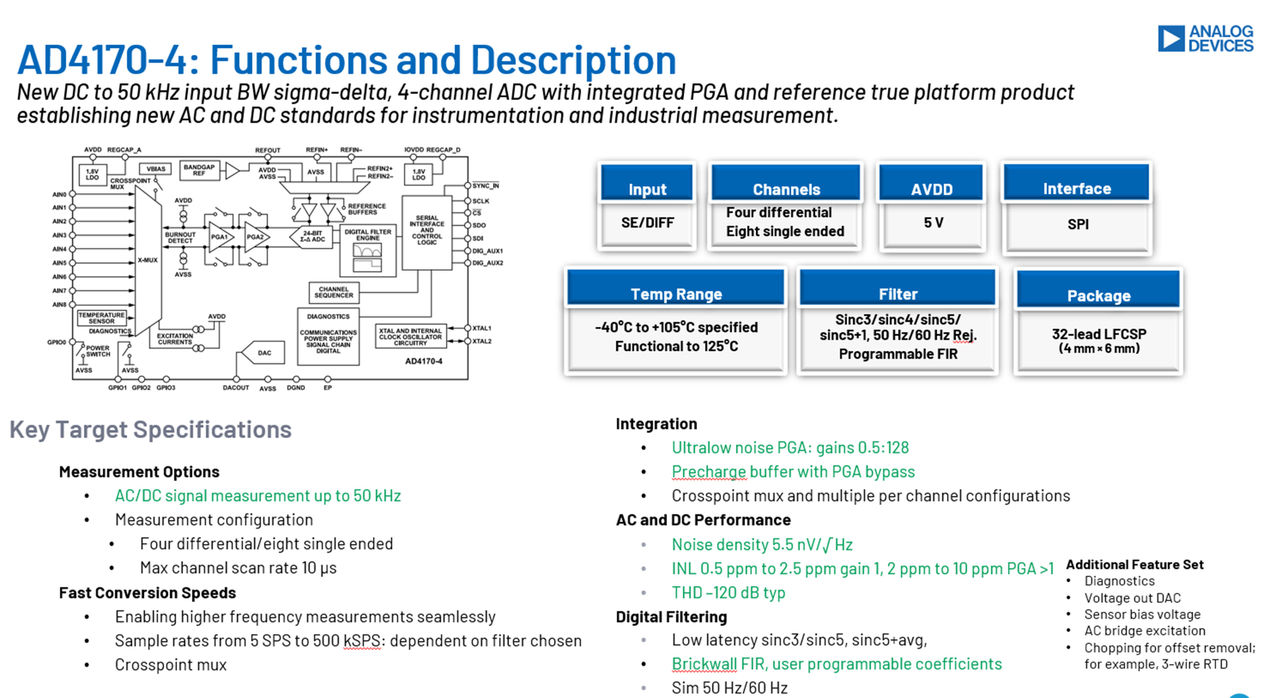
核心特性与定位
AD4170-4 被定位为一款“平台级测量器件”,旨在帮助系统设计者应对多种测量需求,无论是隔离式还是非隔离式应用。其核心优势在于同时具备卓越的直流 (DC) 和交流 (AC) 性能。芯片提供从 DC 到 50kHz 的输入带宽,使其既能处理缓慢变化的传感器信号,也能捕获动态的音频或振动信号。
关键性能参数
该芯片在精度和速度方面表现突出:
- 分辨率与线性度:具备 24 位分辨率,积分非线性 (INL) 典型值低至 ±0.5ppm (满量程范围内),确保了极高的测量准确性。
- 噪声性能:在增益为 128 时,折算到输入端的噪声 (RTI) 密度低至 5.5 nV/√Hz,有利于提取微弱的信号。
- 动态性能:在典型工作条件下 (VREF=4.096V,增益=1),信噪比 (SNR) 可达 110dB,总谐波失真 (THD) 低至 -120dB,保证了高保真的信号采集。
- 转换速度:支持最高 500kSPS 的输出数据速率,在多通道扫描模式下,每个通道的数据速率可达 71.4kSPS (对应 14µs 的建立时间),能满足高速数据采集的需求。
高度集成的功能模块
AD4170-4 的高集成度是其一大亮点,它集成了测量系统中常用的多个关键模块,简化了外部电路设计:
- 可编程增益放大器 (PGA):集成了一款超低噪声的 PGA,增益范围从 0.5 倍到 128 倍。当需要超低失真测量时,输入路径可以绕过 PGA。
- 精密基准电压源:内置了低温漂 (5ppm/°C) 的基准电压源,为整个系统提供了稳定可靠的高精度参考。
- 传感器激励与偏置:芯片包含了用于传感器激励电流和传感器偏置的关键构建模块,并集成了一个 12 位可编程电压输出 DAC,可直接用于传感器偏置或激励,进一步增强了系统集成度。
- 数字滤波器:芯片集成了多种数字滤波器,有助于在各种环境下提高信号质量,降低噪声干扰。
- 输入与电源:提供 4 路差分或 8 路伪差分模拟输入,并具有对非活动输入端的过压/欠压耐受能力。其模拟电源支持 4.75V 至 5.25V 或 ±2.5V,数字电源范围从 1.7V 至 5.25V,兼容性广泛。
在典型的六维力传感器设计中,通常采用全桥式布局,使用 120Ω 或 330Ω 金属箔应变片,每个测量通道由 4 片应变片构成惠斯通电桥。信号调理环节要求增益为 500~1000 倍,共模抑制比不低于 120dB。数据采集部分则需 24 位 ADC,支持多通道同步采样,且 ODR 输出最好是在百 KSPS。
基于以上技术指标,AD4170 系列产品是理想的解决方案。值得关注的是,ADI 计划于今年推出 AD4175,该器件为八通道版本,可进一步满足更高集成度的采集需求。
五、AD4170-4 实测性能分析
针对采用 AD4170-4 的六维力传感器设计方案,我们对其关键性能指标进行了实际性能测试。下图 (图9) 为不同增益设置下的噪声与分辨率实测结果:
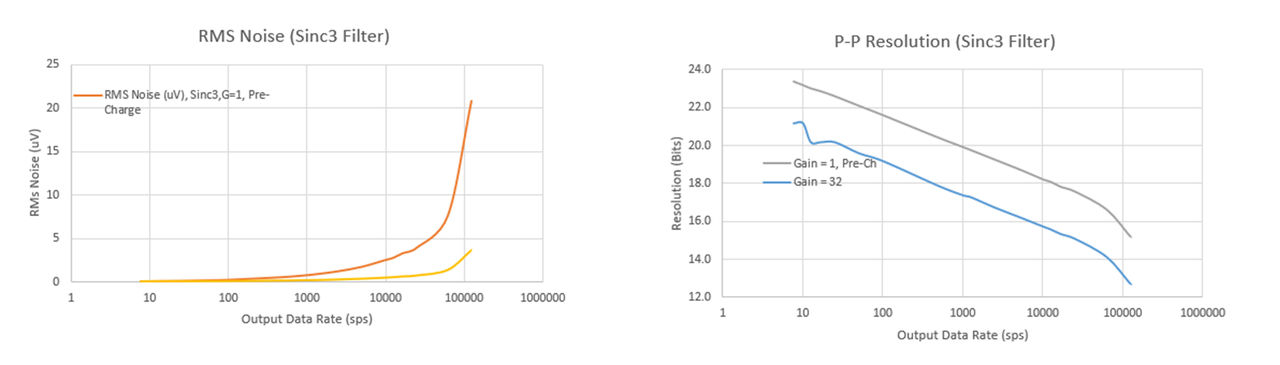
观察 AD4170-4 核心,左图显示增益为 1 和增益为 32 时的 RMS 噪声。右图显示了 p-p 分辨率。从图中可以看出,p-p 分辨率在低输出数据速率下为 24 位,增益为 1。随着输出数据速率的增加,p-p 分辨率如预期的那样以线性方式降低。在 125ksps 时,大约是 15 位。在增益为 32 时,p-p 分辨率仍然非常好,在低输出数据速率下为 21 位,在 125ksps 时降至 12.5 位。实测水平非常优秀。
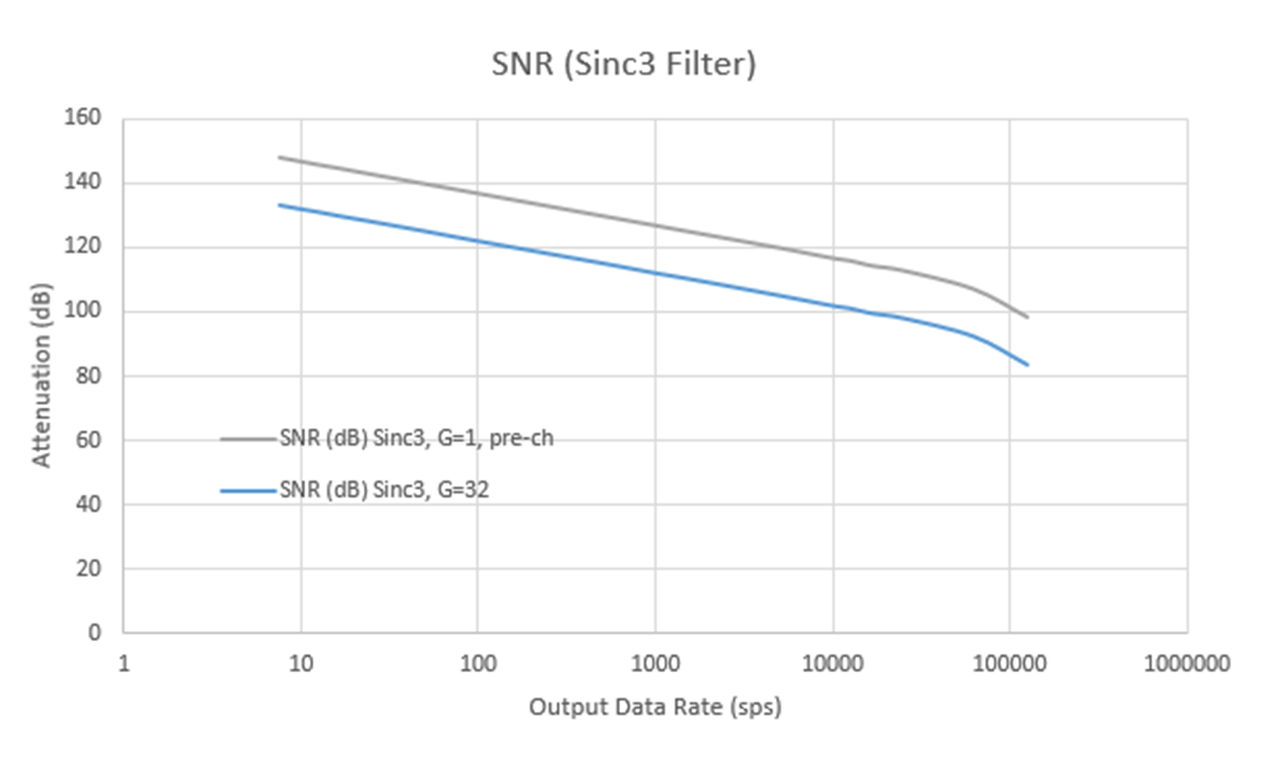
下图 (图10) 展示了 AD4170-4 的信噪比 (SNR) 实测结果。您可以再次看到 ADC 在有 PGA 和没有 PGA 的情况下都实现了极好的信噪比,因此,AD4170 从交流和直流角度均可提供高精度。
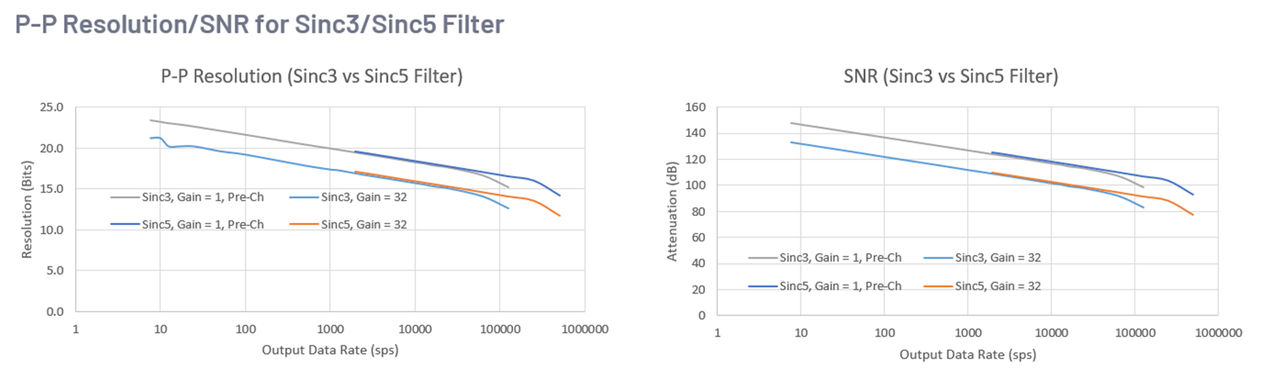
下图 (图11) 对比了 sinc3 与 sinc5 两种数字滤波器的性能表现。从图中可以看出,实测数据为 sinc5 滤波器添加了 p-p 分辨率和信噪比。在较低的输出数据速率下,sinc3 和 sinc5 滤波器给出相似的分辨率和信噪比。在非常高的输出数据速率下,sinc5 滤波器更有效地抑制噪声,从而获得更好的分辨率和更好的信噪比。
六、AD4170-4 实际现场特色功能展示
AD4170-4 集成的多种特色功能可有效应对六维力传感器设计中的实际工程挑战,以下结合典型应用场景进行说明:
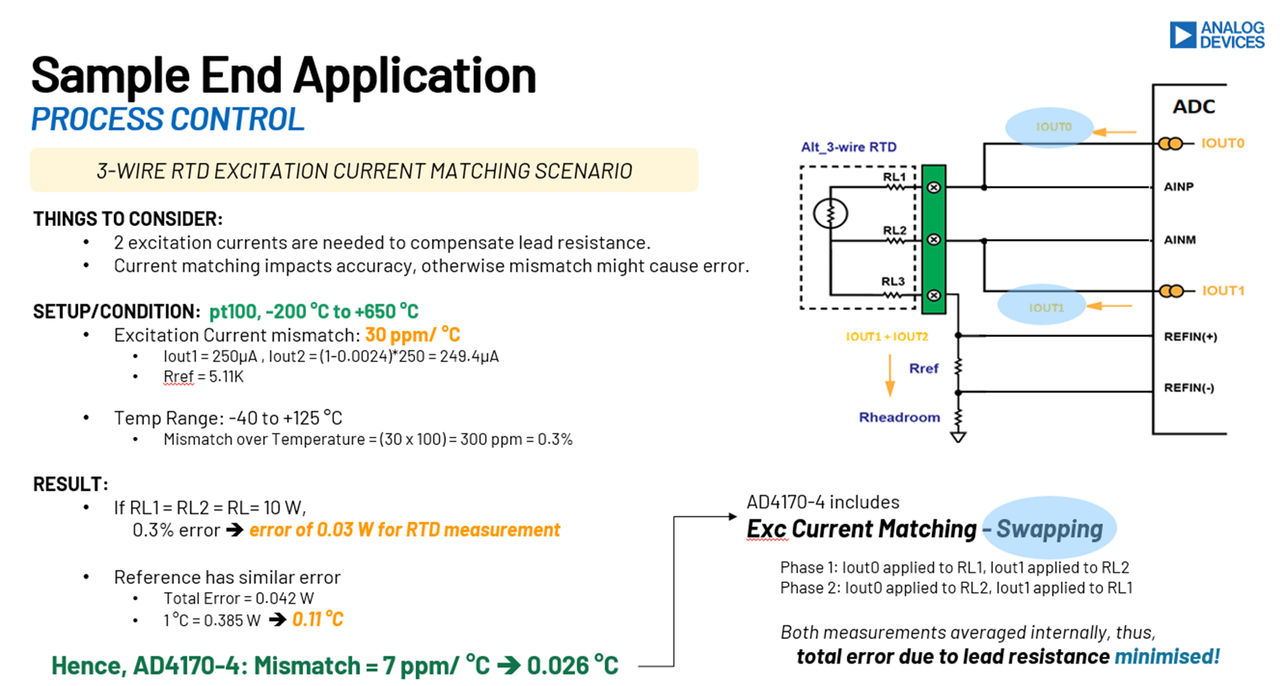
AD4170-4 支持 2 线、3 线及 4 线 RTD 接入。由于 RTD 信号电平通常在 10mV~100mV 范围内,系统需配置增益级进行放大,同时模拟输入与参考输入需具备宽共模范围。此外,外部 RC 滤波可用于抗混叠或 EMC 防护。
以下图 (图12) 所示的 3 线传感器 RTD 为例,引线电阻需要主动取消。从图中可以看到,Iout0 流过引线电阻 RL1 和 RTD,RL1 与 RTD 串联。通过使用第二个执行电流 Iout1,第二个电流流过另一个引线 RL2。通过 RL2 产生的电压与通过 RL1 产生的电压相反,因此引线电阻引起的误差被取消。其工作原理为:由于执行电流完全匹配,同时引线长度相似且材料相同,因此引线电阻的总误差可以消除。
对于六维度力传感器,灵敏度通常为 1-2mV/V。以 5V 激励电压为例,传感器输出的最大信号仅为 5mV~10mV,因此系统设计中必须加入增益级进行信号放大。另外,传感器需要考虑温度补偿。 AD4170 同时支持这两类测量需求,为系统设计提供了完整的信号链组件。
如下图 (图13) 所示,应变传感器本身可以是直流激励,也可以是交流激励。在交流励磁下,任何直流感应 EMF 都被消除,从而导致高精度。AD4170 可以为交流励磁提供驱动信号。
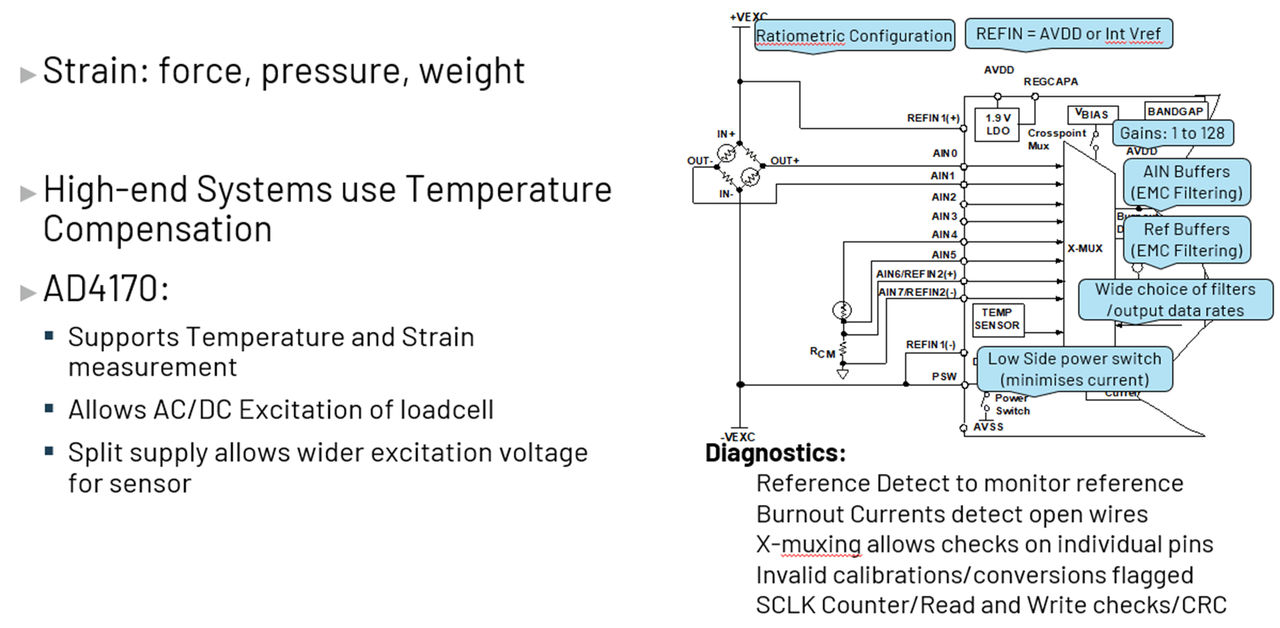
最后,对传感器使用更高的激励电压意味着输出信号更大,从而表现更好的系统精度。AD4170-4 支持分路电源工作模式,为设计者提供了更大的灵活性 (传感器信号偏置在激励+与激励-之间),可适应多种供电架构需求。
七、总结
本文系统介绍了六维力传感器的工作原理、设计要点,并结合 ADI AD4170-4 模拟前端芯片,展示了从应变电桥到数字输出的完整信号链解决方案。同时通过一系列实测结果,表明该方案在分辨率、信噪比等关键指标上均表现出色,可满足人形机器人对六维力感知的严格要求。
欲了解关于更多 ADI 相关方案或技术信息,请与骏龙科技当地的办事处联系或点击下方「联系我们」,提交您的需求,骏龙科技公司愿意为您提供更详细的技术解答。
更多信息:
相关链接
Copyright 2026 Macnica Cytech Limited

