

面向人形机器人的一维力传感器及其 ADI 方案

人形机器人实现触觉感知的重要部件是一维力传感器,其力感知系统需采用多层级传感架构,通过集成多维力传感器、关节扭矩传感器及一维拉力传感器实现协同控制。本文将介绍一维力传感器中 ADI 的方案,同时结合实际设计案例给出参考设计方案。
一、一维力传感器介绍以及机器人应用场景
(一)工作原理
一维力传感器基于应变测量原理,实现单向力的精确检测。其核心结构包含弹性体和应变敏感元件两个部分:当被测力作用于弹性体时,会产生相应的机械形变,这种形变通过粘贴在弹性体表面的应变片转换为电阻变化。通过惠斯通电桥电路,可以将微小的电阻变化转换为可测量的电压信号,从而实现对作用力的精确量化。
一维力传感器展现出独特的单向测量特性,其测量性能与作用力的方向密切相关。该传感器的基准坐标系以 OZ 轴为测量主轴,当被测力矢量 F 与 OZ 轴完全重合时,系统能够实现最优测量精度。这种设计使其特别适用于作用方向明确的应用场景。
(二)应用场景
人形机器人的力感知系统需采用多层级传感架构,通过集成多维力传感器、关节扭矩传感器及一维拉力传感器实现协同控制。以典型人形平台为例,其足部设计常在跖骨区域部署一维力传感器阵列,通过分布式测量策略获取高密度接触力信息。这种配置显著提升了机器人对非结构化地形(如松散砂石、弹性表面)的适应性,为步态控制提供更精细的地面反作用力数据。如特斯拉 Optimus 前部在脚趾部位增加了一维力传感器:

二、一维力传感器中 ADI 的方案
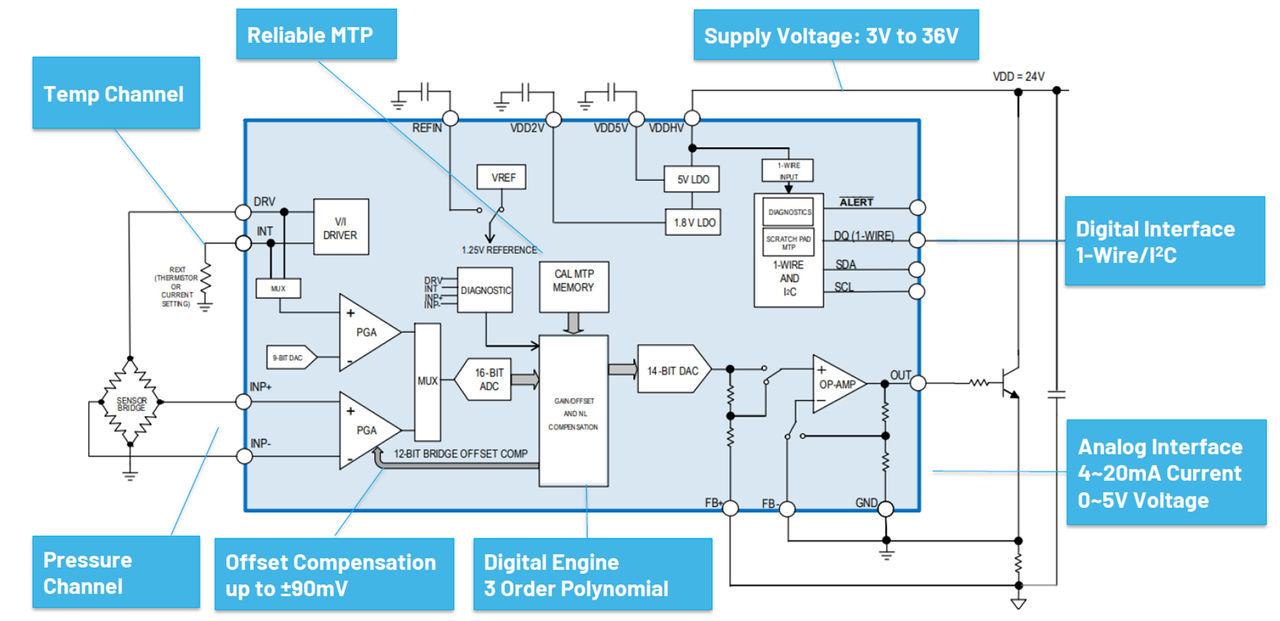
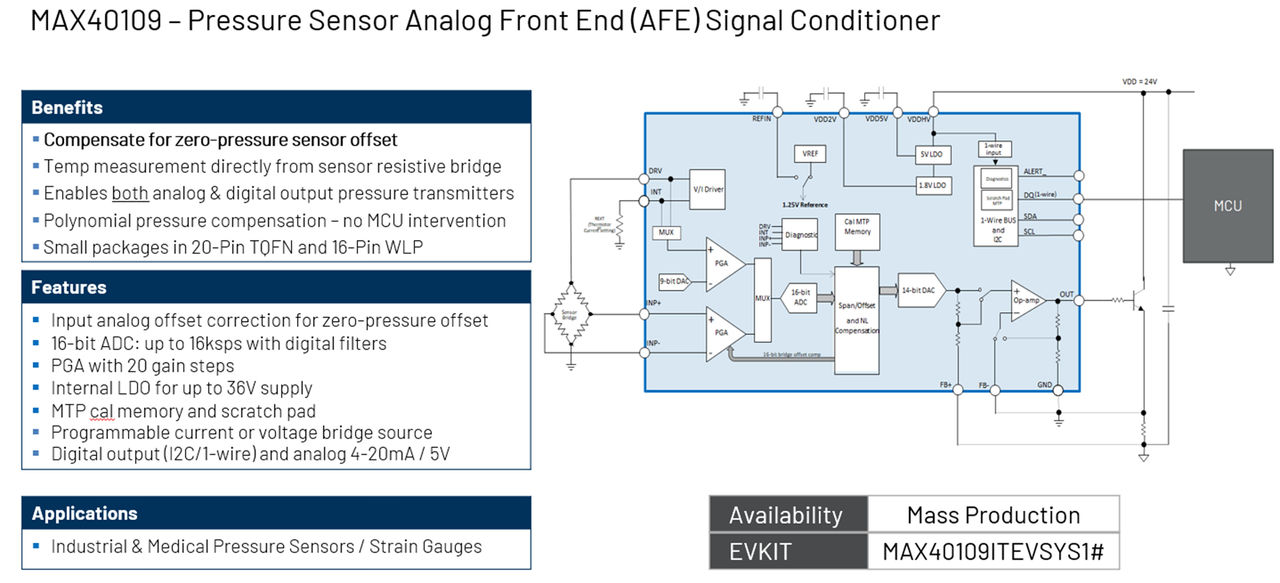
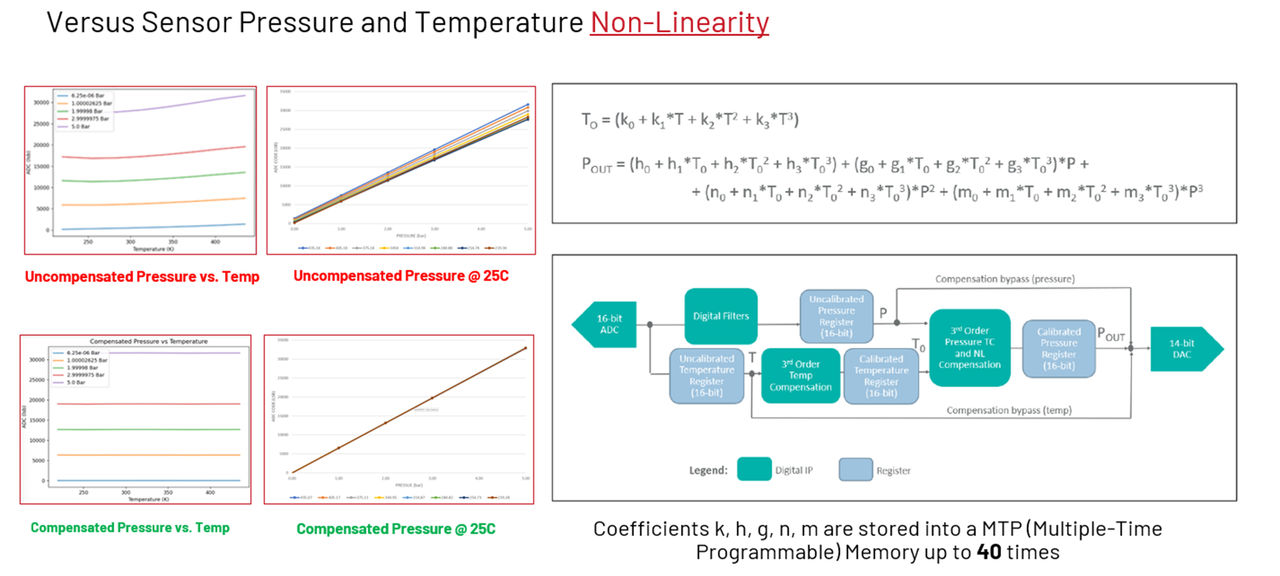
MAX40109 是一款低功耗、精密传感器接口 SoC,集成高精度、可编程模拟前端(AFE)、模数转换器(ADC)、校准存储器和数字信号处理,此外还包括一个带输出缓冲器的数模转换器(DAC),支持模拟电压输出和 4mA-20mA 电流环路。
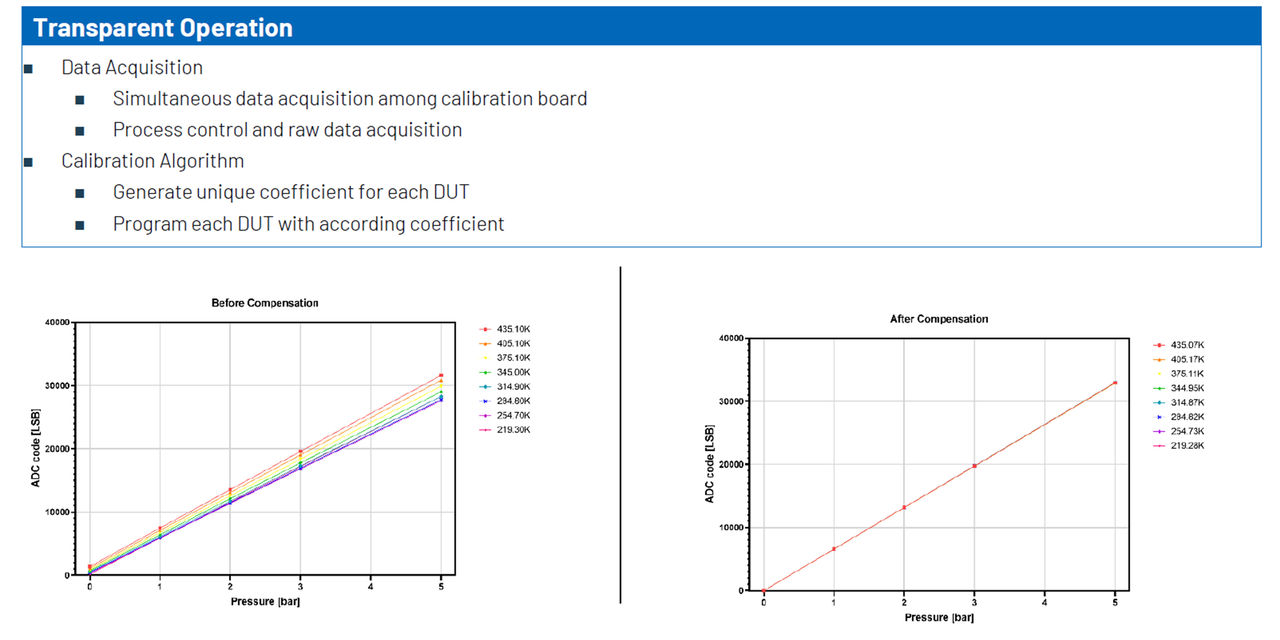
该器件通过单次流校准技术,革新传统压力传感标定流程:
- 消除传统方案必需的双阶段标定工序,缩短工厂校准时间 ≥30%
- 利用 DSP 实现传感器非线性实时补偿,省去多达 10 个激光修调电阻
- 内置温度测量模块直接从传感器电桥获取温度数据,无需外置热敏电阻
系统级优化使整体方案占板面积缩减至传统设计的 30% 以下,显著降低 BOM 成本与生产复杂度。
三、设计一维力传感器模组中关键性参数
A:传感器本体参数
参数类别 | 技术指标 | 工程意义 |
量程 (Range) | ±10N ~ ±50kN (常见工业范围) | 决定测量上限,需预留 150% 过载余量 |
灵敏度 (Sensitivity) | 1-3mV/V (应变片式) | 每伏激励电压对应输出,值越高信号越强 |
非线性度 (Nonlinearity) | ≤±0.1% FS (精密级) | 实际特性曲线偏离理想直线的最大偏差 |
重复性 (Repeatability) | ≤±0.05% FS | 同条件下多次测量结果的一致性 |
零点漂移 (Zero Drift) | <0.01% FS/℃ (带温度补偿) | 温度变化引起的零位输出偏移 |
B:信号调理关键参数
模块 | 参数要求 | 设计考量 |
激励电压 | 5V/10V DC (典型值) | 电压波动需 <0.05% 避免引入误差 |
采样率 | ≥1kHz (动态测量) | 需满足奈奎斯特采样定理 (信号频率 2 倍以上) |
ADC 分辨率 | 16-24位 (Σ-Δ 型优选) | 16 位 ADC 可分辨 0.01% FS 微小变化; |
滤波带宽 | 可编程 0.1Hz-500Hz | 低通滤波抑制高频噪声,带宽需匹配信号频段 |
共模抑制比 | >100dB (仪表放大器) | 抑制电源噪声及环境干扰 |
四、基于 MAX40109 的实际测试与校准流程
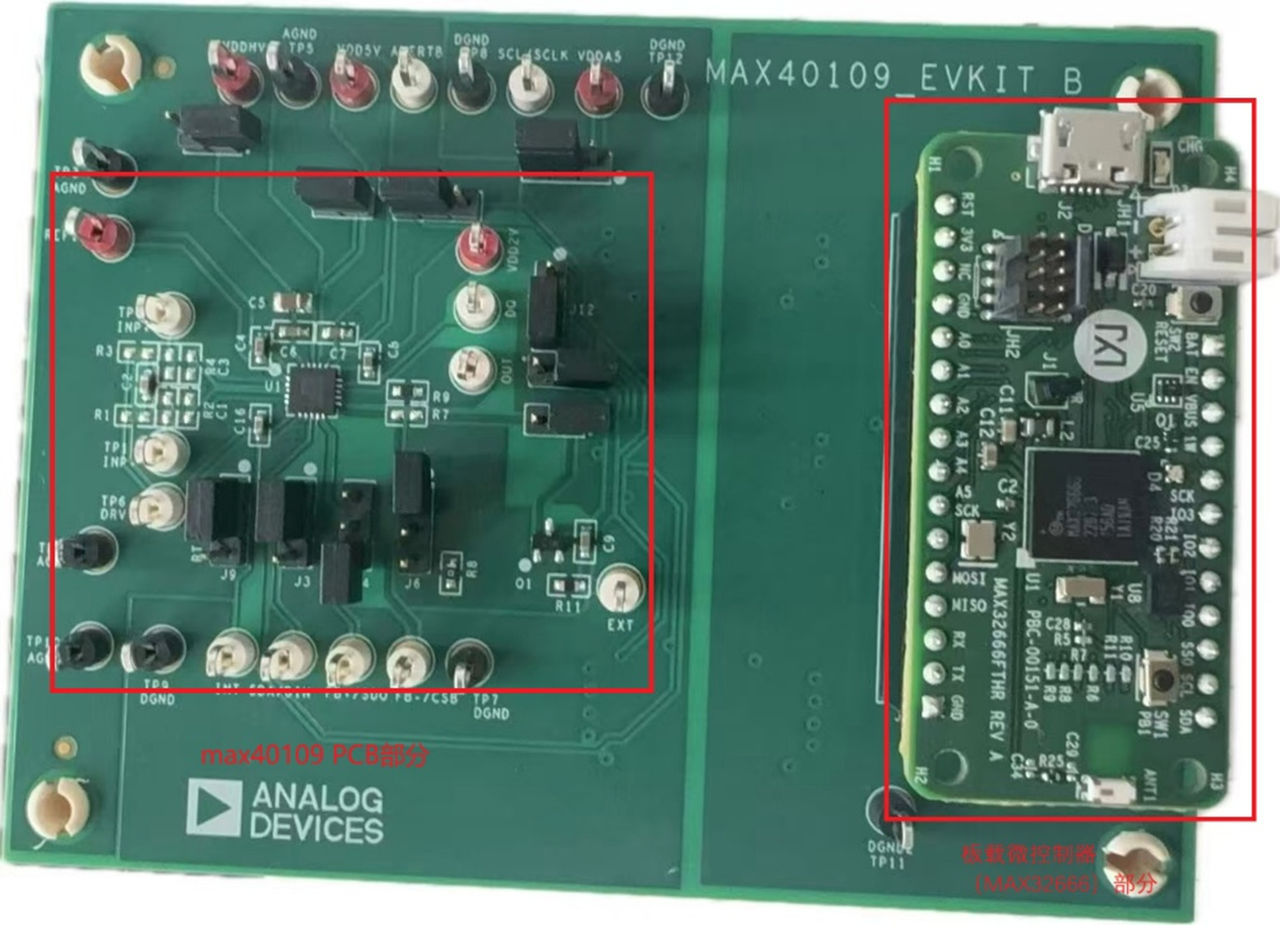
下面笔者将使用 MAX40109EVSYS 适配市面上两款常见的一维力传感器本体来分析测试细节。MAX40109EVSYS 分为三个部分:
1、MAX40109 板载开发板
2、板载微控制器(MAX32666)用于评估 MAX40109
3、 USB 线缆
测试同时还需要准备以下这些物件:
1、3V 至 36V,100mA 直流电源;2.75V 至 6V,100mA 直流电源
2、两个直流电压源
3、电压表
4、安装好 MAX40109 GUI 上位机的电脑
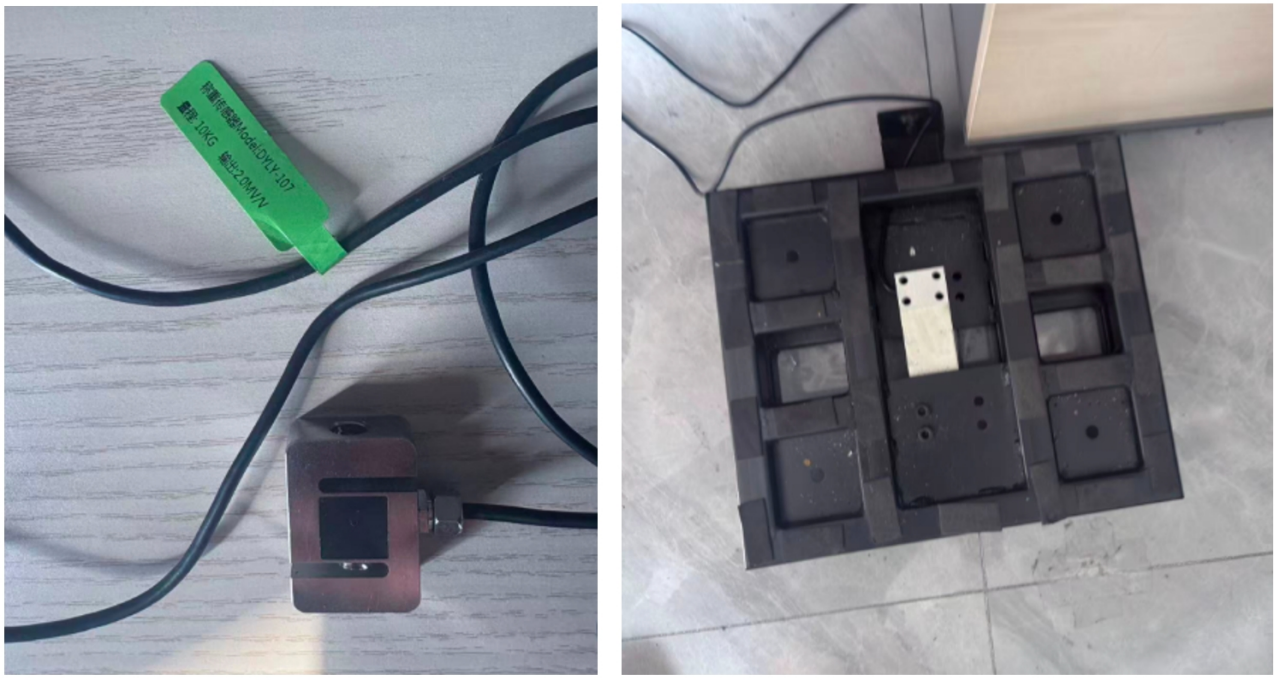
本次测试选用两款常见一维力传感器:微型一维力传感器与大型压力称重型维力传感器。如下图(图5)所示:
硬件连接步骤
1、主电源配置:
将 3V-36V 电源设为 5V 输出;正极接评估板 VDDHV 测试点;负极接 AGND 测试点。
2、基准电压测量
测量 VDD5V 测试点电压值(因为 MAX40109 内部自带 LDO;可以给传感器本体进行 5V 供电)。
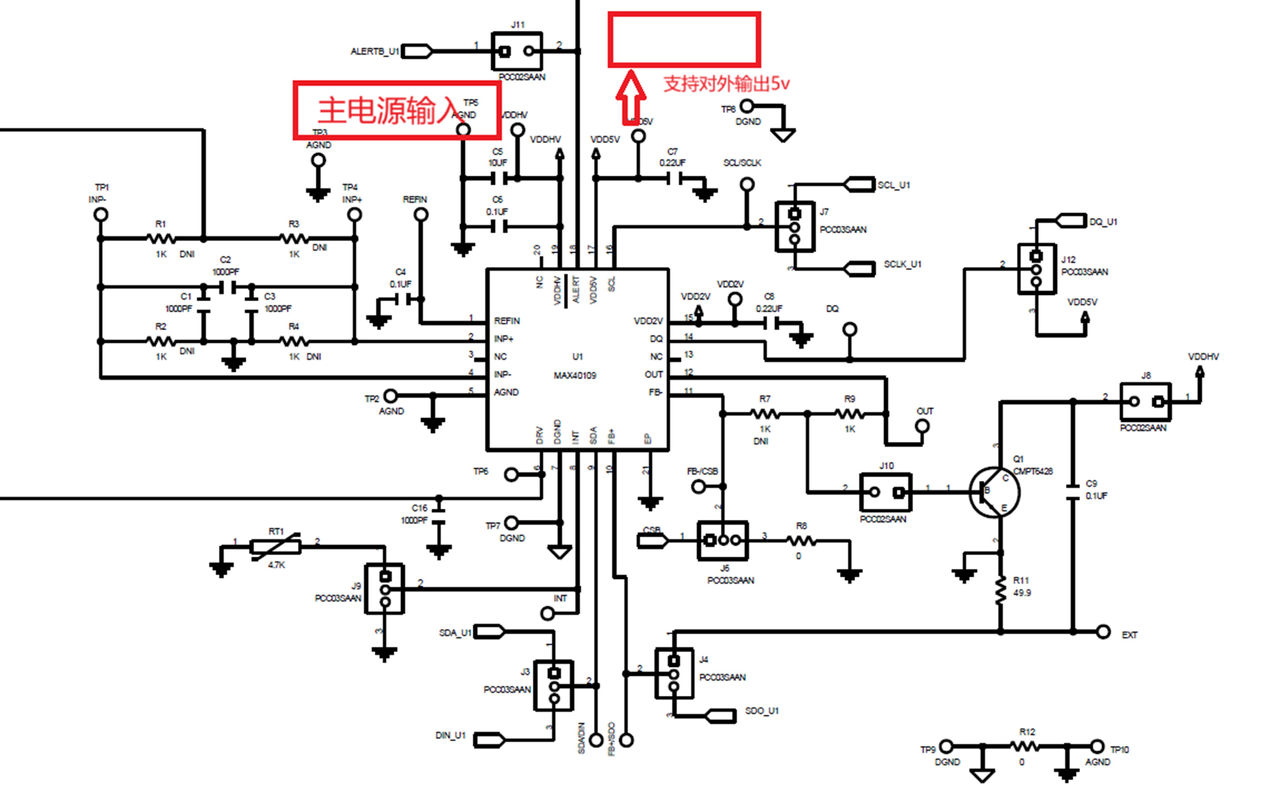
3、次电源配置
设置 2.75V-6V 电源输出正极接 VDDA5 测试点;负极接 DGND 测试点;用于方便测试。
4、信号源接入
需要将一维力传感器的 IN+ 以及 IN- 和 MAX40109 输入端对应连接(注意有的传感器本体需要 5V 供电);
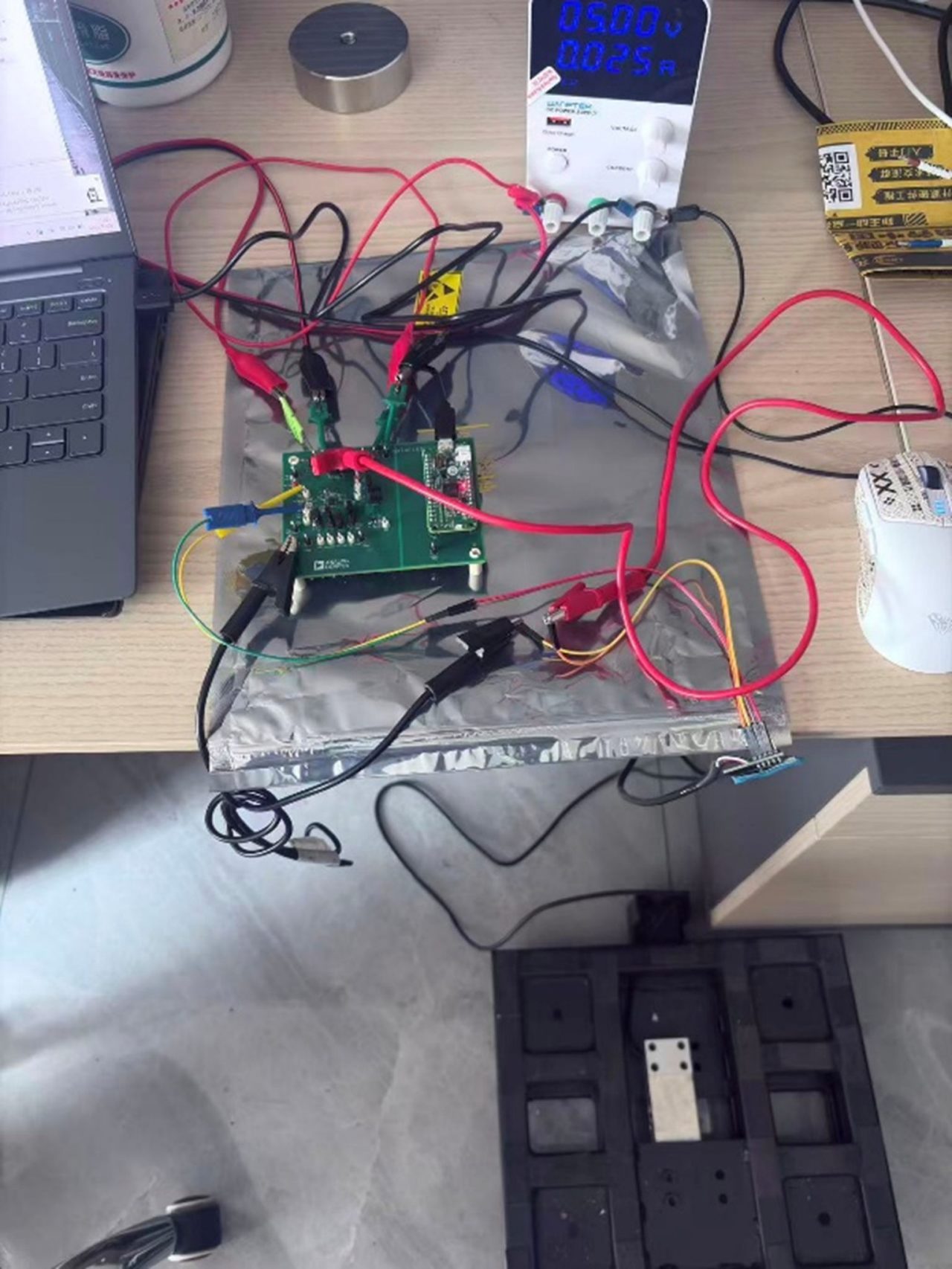
硬件环境搭建完毕后如下图所示:
如何判断您的 MAX40109 是否正常工作?
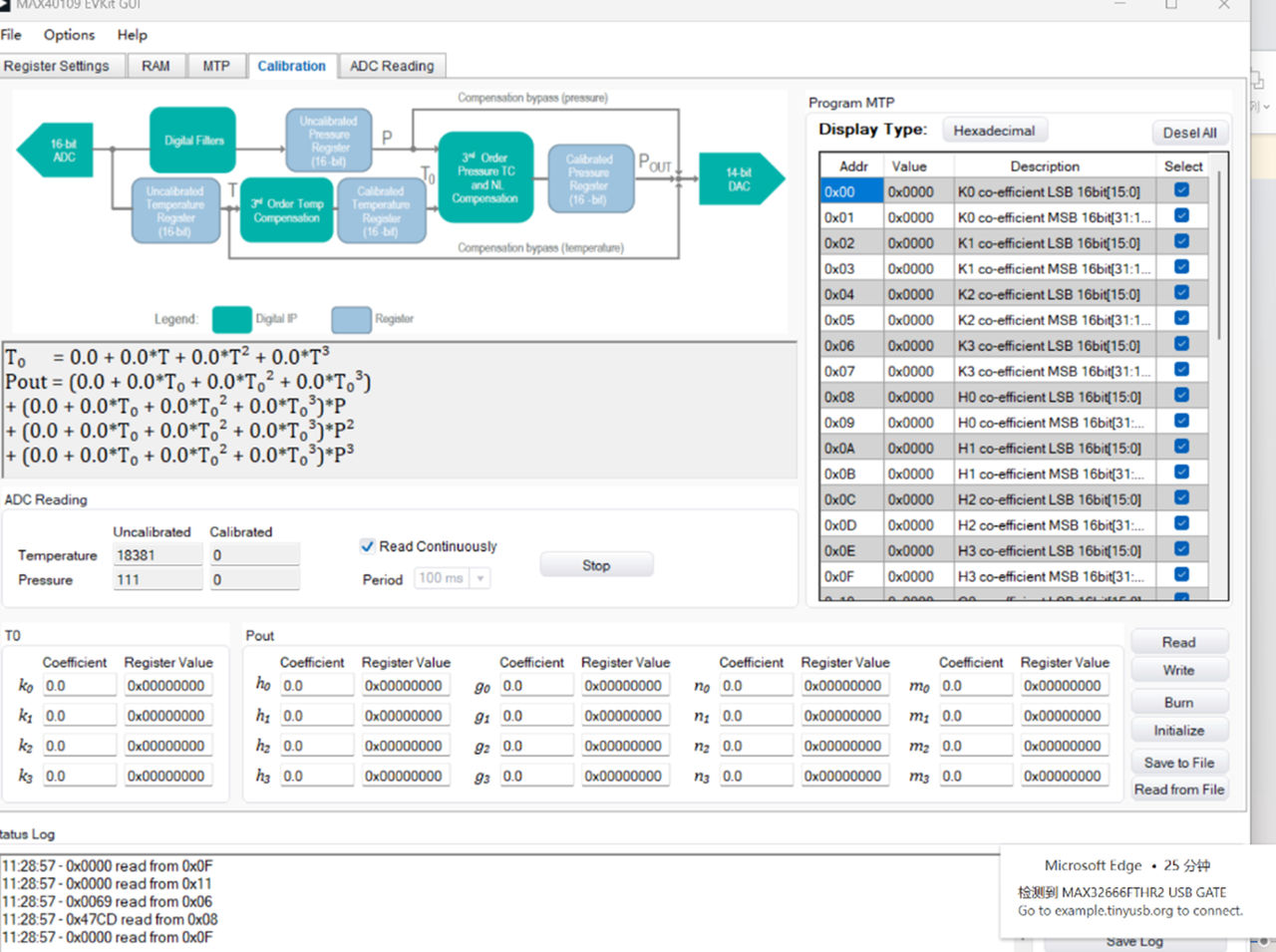
打开 GUI 文件上位机,如下图(图8)所示 MAX40109 的初始化均适配完成;同时 MAX32666 的 USB GATE 可以正常扫到该芯片。
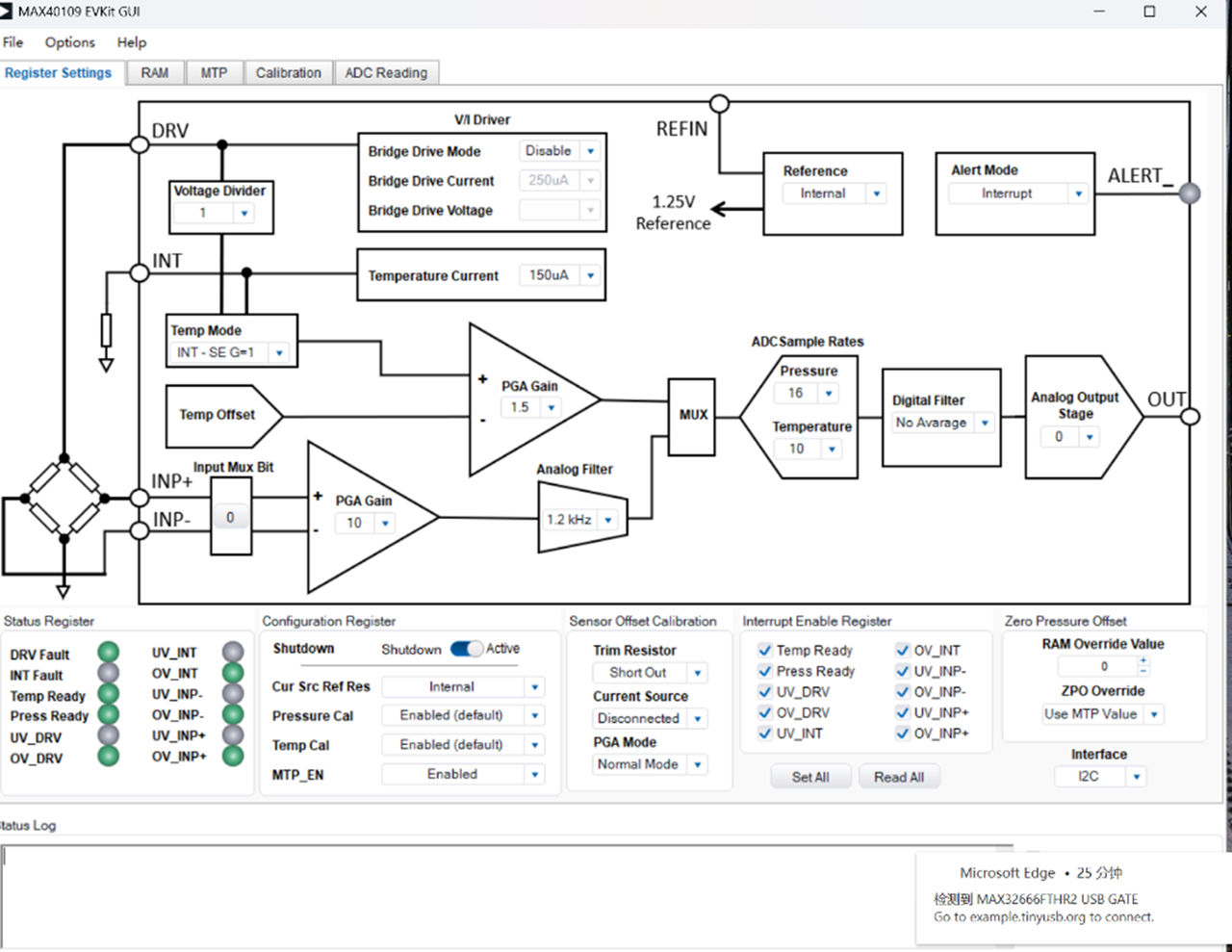
配置步骤如下:
- 在 Configuration Register 分组框中:
- 从 Pressure Cal 下拉菜单选择 Bypass (Raw Mode)
- 默认 PGA Gain 值为 10
- 在右侧 Analog Output Stage 下拉菜单中选择所需参数
- 完成参数配置后,点击 Set All 按钮提交设置
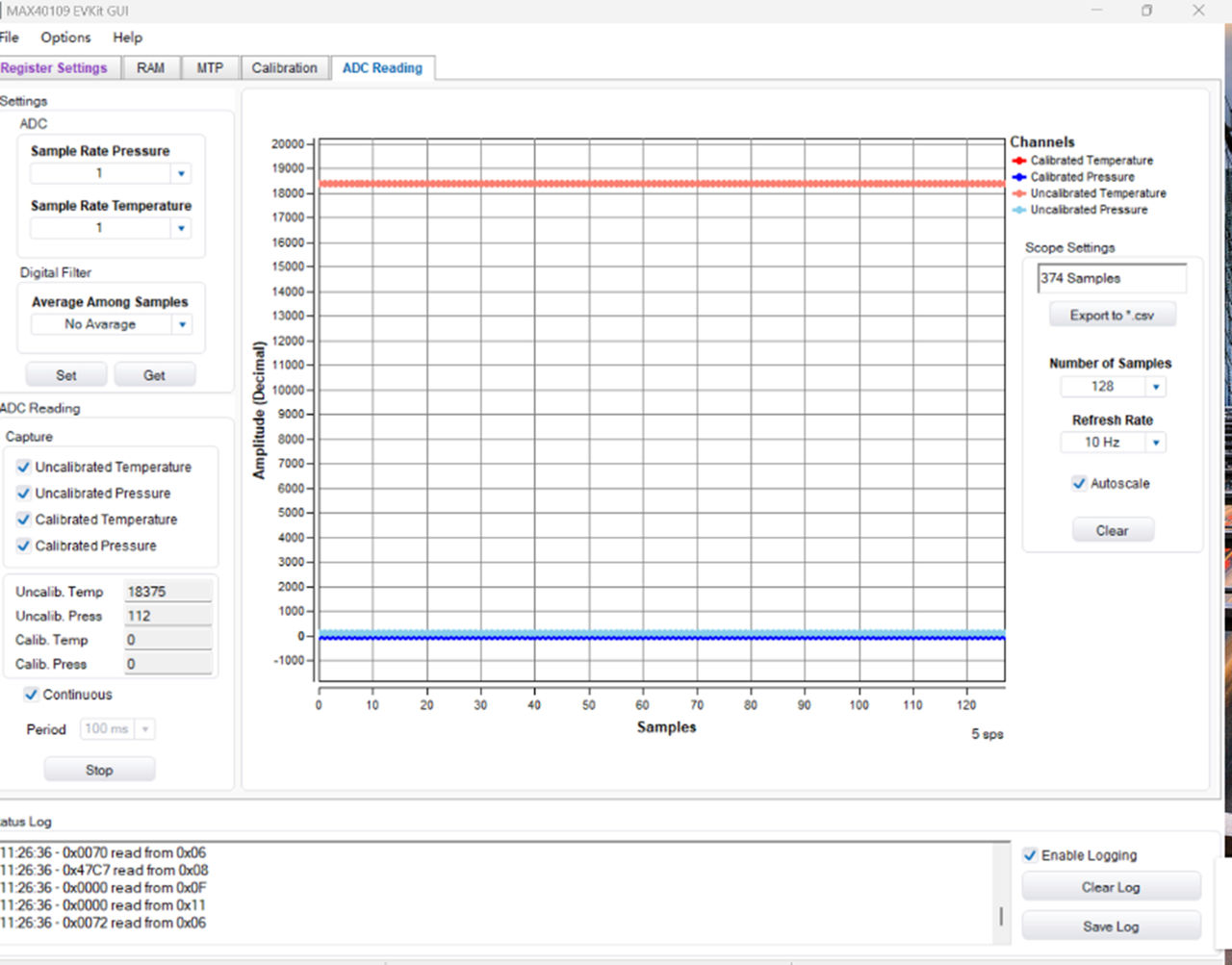
此时点击 ADC READING 可以进行实时参数的采集;ADC 读数标签页实时显示 RAM 寄存器中的压力与温度测量值,包含以下两类数据:
- 校准数据:经 DSP 算法处理后的补偿值
- 原始数据:传感器直接输出的未处理原始值;同时进阶的话可以针对两组数据进行实时的数据分析
特别功能配置介绍:算法校准部分(通过内部集成的DSP则可实现非线性补偿)
如下图(图10)所示:
在上位机软件操作实现校准:以压力校准为例。操作步骤如下:
步骤 1:寄存器初始配置
- 进入 Register Settings 标签页
- 在 Configuration Register 分组框中:
- Pressure Cal 下拉菜单选择 Bypass (Raw Mode)
- 保持以下偏移校准选项为默认状态
- 修调电阻-已连接 (Trim Resistor-Connected)
- 电流源-禁用 (Current Source-Disconnected)
- PGA 模式-正常 (PGA Mode-Normal)
- 点击 Set All 提交配置
步骤 2:零点偏移使能
- 切换至 MTP 标签页,在 CONFIG MTP (0x44) 寄存器中输入 0x404D
- 依次点击:Initialize→Write
步骤 3:零点偏移值写入
- 在 MTP 标签页中:定位 ZERO_PRESSURE_OFFSET (0x3D) 寄存器
- 在值字段输入偏移量依次点击:Initialize→Write
步骤 4:原始压力数据采集
- 进入 RAM 标签页读取 Uncalibrated Pressure (0x06) 寄存器值
- 记录原始压力代码
步骤 5:补偿系数配置
- 打开 Calibration 标签页,在 T0 and Pout 分组框中:
- 输入用户计算的补偿系数
- 未使用系数填 0,依次点击:Initialize→Write(可重复修改)
- ⚠️仅最终确认后点击 Burn(限次烧录)
步骤 6:启用压力补偿
- 返回 Register Settings 标签页,Pressure Cal 下拉菜单改选 Enabled (默认模式)
- 点击 Set All 激活补偿
步骤 7:校准验证
- 在 RAM 标签页读取 Calibrated Pressure (0x0F) 寄存器
- 对比目标压力下校准前后数据
五、总结
人形机器人的力感知系统需采用多层级传感架构,通过集成多维力传感器、关节扭矩传感器及一维拉力传感器实现协同控制。本文以典型人形平台为例,详细介绍了一维力传感器在机器人中的应用背景,并重点阐述了一维力传感器中 ADI 的方案,同时结合实际设计案例给出参考设计方案。
欲了解关于更多 ADI 相关方案或技术信息,请与骏龙科技当地的办事处联系或点击下方「联系我们」,提交您的需求,骏龙科技公司愿意为您提供更详细的技术解答。
更多信息:
相关链接
Copyright 2026 Macnica Cytech Limited

